

Accuracy Mast Pointing Control Method for Multi-Spectral Camera Exploration of Mars Rover
-
摘要:为解决火星车桅杆搭载小视场多光谱相机对特定目标精确指向的问题,设计了火星车桅杆精确指向方法,对火星车桅杆机构运动学过程进行了建模,设计了桅杆控制参数迭代求解方法以及火星车对目标探测工作流程,对提出的控制方法进行了误差分析。经过中国首次火星探测任务实践证明,设计的方法可满足多光谱相机精确指向的要求。Abstract:Planning and control for scientific exploration is one of the key technologies for rover teleoperation. Multi-spectral camera that can detect components in coals and rocks on Mars is mounted on the mast of Zhurong Mars Rover. To achieve the goal of accuracy pointing to particular target, an accurate method to calculate angles of mast joints was proposed. The iterative solution method of mast control parameters and the working flow of rover target detection were designed. The error analysis of the method was conducted. Through the practice of China's first Mars exploration mission, the method is satisfied the demands for detection for narrow-field-of-view multi-spectral camera.Highlights
● An accuracy mast pointing control method for narrow-FOV strategy of multi-spectral camera exploration of Mars rover was proposed. ● The work flow of multi-spectral camera exploration for different scenarios was designed. ● The proposed method in the article was verified through China’s first Mars exploration mission. -

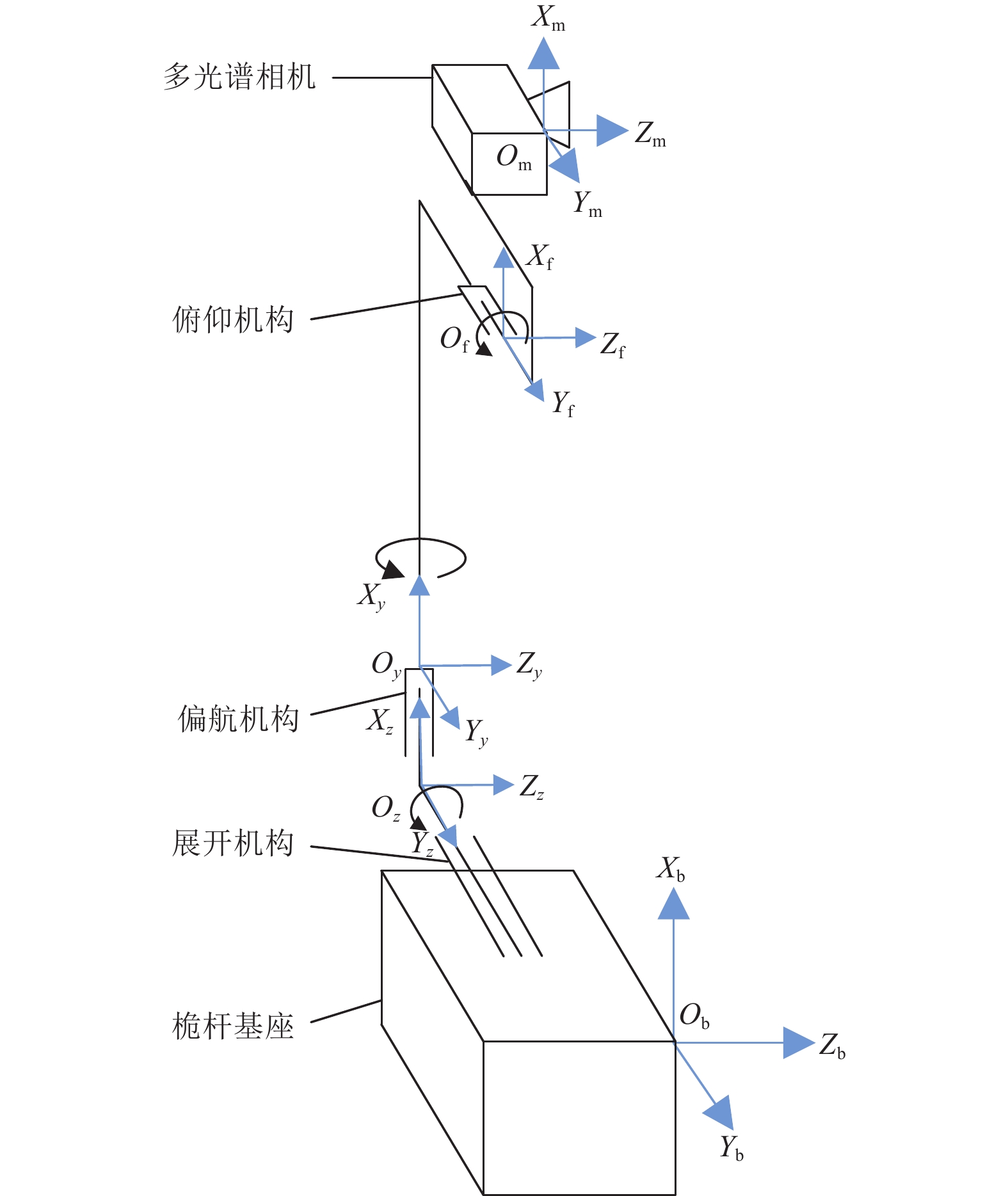
图 2定点坐标系至桅杆安装座坐标系转换关系
Fig. 2Transformation from special point coordinate system to the mast mounting base coordinate system

图 3桅杆安装座坐标系至多光谱相机坐标系的转换关系
Fig. 3Transformation from mast mounting base coordinate system to multi-spectral camera coordinate system

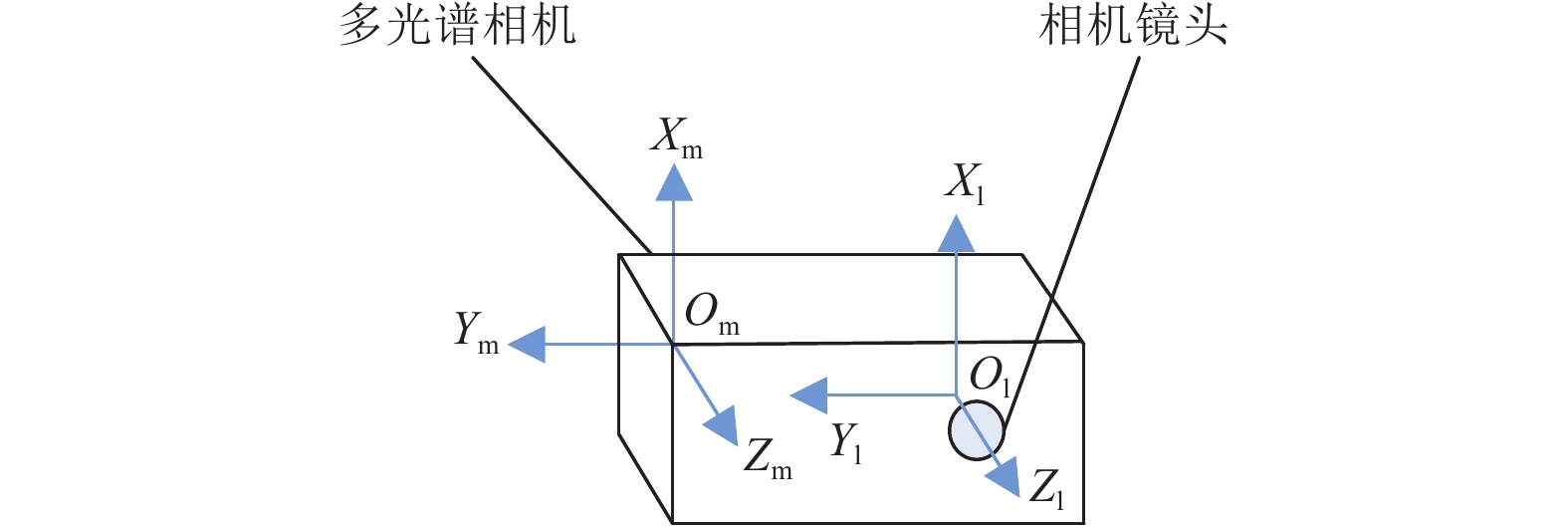
图 4多光谱相机坐标系至相机镜头系的转换关系
Fig. 4Transformation from multi-spectral camera coordinate system to camera lens coordinate system

图 7桅杆控制误差引起的瞄准误差(机械坐标系)
Fig. 7Aiming error caused by mast control error (Mechanical coordinate system)

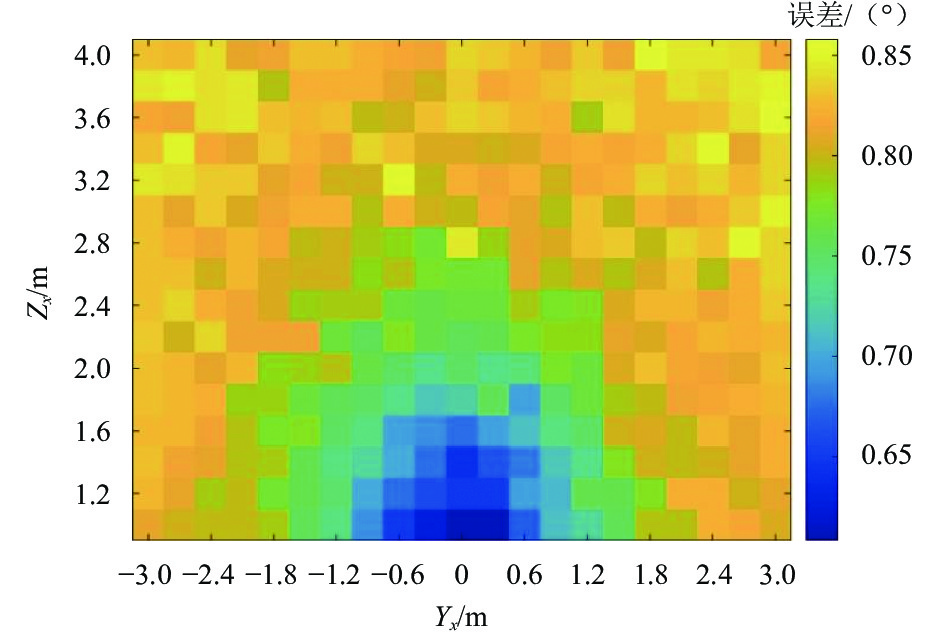
图 8目标点定位误差引起的瞄准误差(机械坐标系)
Fig. 8Aiming error caused by Target point positioning error (Mechanical coordinate system)

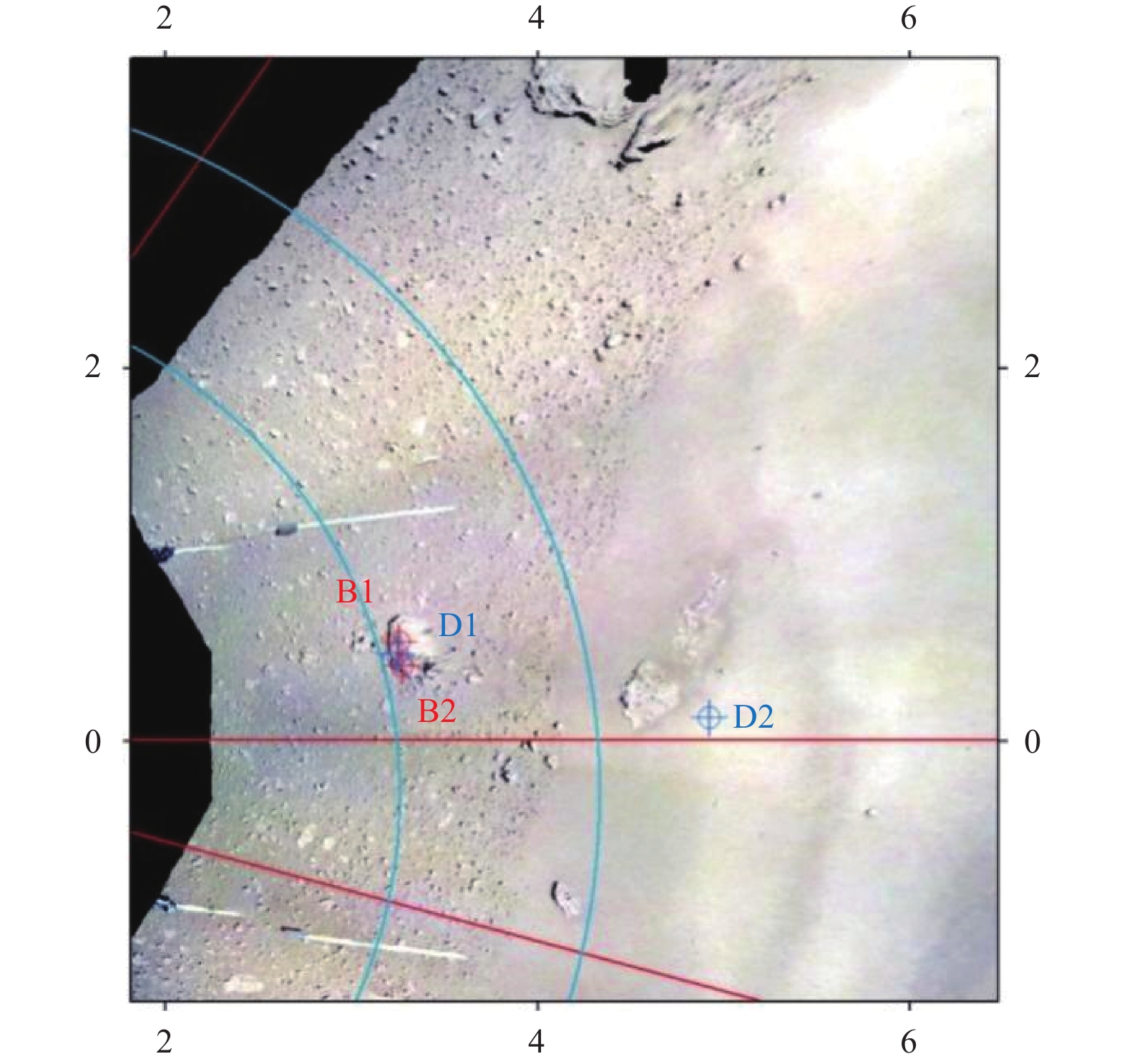
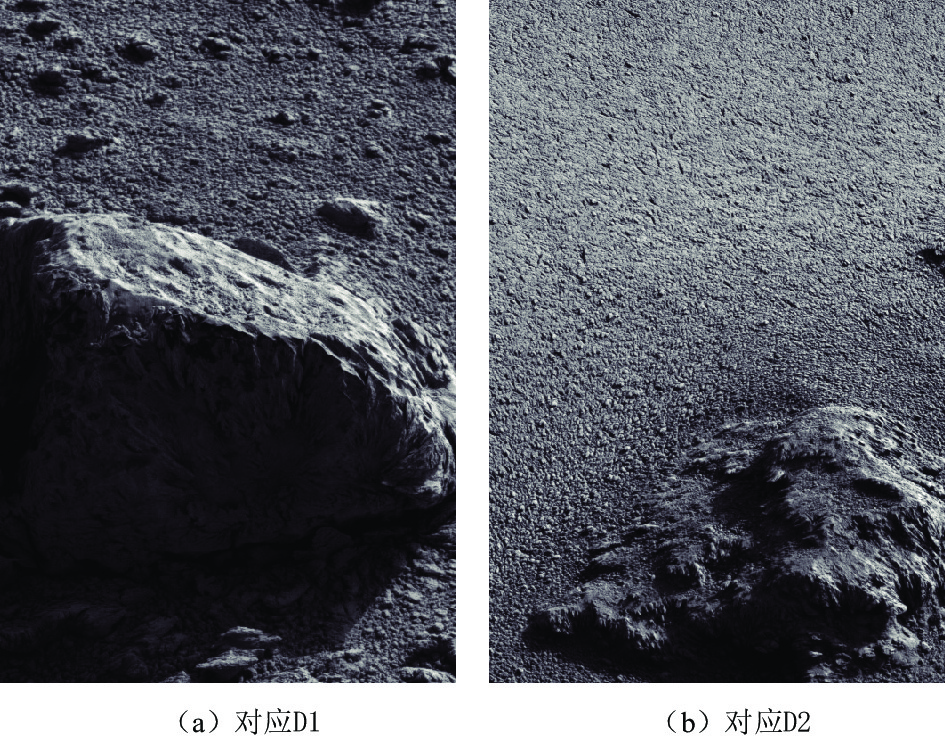
图 9DOM图像中的期望探测点(D1和D2为期望的多光谱探测点,B1和B2为表面成分测量仪的期望探测点)
Fig. 9Desired exploration points in DOM image (D1 and D2 were exploration points for multi-spectral camera, B1 and B2 were exploration points laser-induced breakdown spectroscopy)
-
[1] 张辉,卢皓,于天一,等. “祝融号”火星车遥操作技术[J]. 深空探测学报(中英文),2021,8(6):582-591.ZHANG H,LU H,YU T Y,et al. Teleoperation technology of Zhurong Mars rover[J]. Journal of Deep Space Exploration,2021,8(6):582-591. [2] TIAN H,ZHANG T,JIA Y,et al. Zhurong:features and mission of China’s first Mars rover[J]. The Innovation,2021(3):24-25. [3] 谢涓,闫凯,康志忠,等. “祝融号”火星车多光谱相机岩矿类型识别的地面验证研究[J]. 遥感学报,2021,25(7):1385-1399.XIE J,YAN K,KANG Z Z,et al. Verification study for the mineral and rock identification using multispectral camera of the “Zhurong” Mars rover on the Earth[J]. National Remote Sensing Bulletin,2021,25(7):1385-1399. [4] 张宽, 卢皓, 邹雪梅, 等. 玉兔二号复杂月表环境下的定点探测控制方法[C]//2020年中国航天大会论文集. 北京: 中国宇航出版社, 2020. [5] 李亨, 詹亚峰, 裴玉奎. 测控数传通信系统初步设计[C]//中国宇航学会深空探测技术专业委员会第十届学术年会. 太原: 中国宇航学会, 2013. [6] 关昭,乔卫东,杨建峰,等. 火星多光谱相机的地面几何标定研究[J]. 深空探测学报(中英文),2018,5(5):465-471.GUAN Z,QIAO W D,YANG J F,et al. Ground geometric calibration of Mars multispectral camera[J]. Journal of Deep Space Exploration,2018,5(5):465-471. [7] EDWARDS C D. Relay communications for Mars exploration[J]. International Journal of Satellite Communications & Networking,2010,25(2):111-145. [8] 李惠军,高海波,邓宗全. 月球车桅杆机构设计与分析[J]. 机器人,2008,30(1):13-16.doi:10.3321/j.issn:1002-0446.2008.01.003LI H J,GAO H B,DENG Z Q. Design and analysis of the lunar rover mast mechanism[J]. Robot,2008,30(1):13-16.doi:10.3321/j.issn:1002-0446.2008.01.003 [9] 周东,徐晓伟,贾阳,等. 火星车机构集成控制系统设计与实现[J]. 深空探测学报(中英文),2020,7(5):450-457.ZHOU D,XU X W,JIA Y,et al. Design and implementation of integrated control system for Mars rover mechanism[J]. Journal of Deep Space Exploration,2020,7(5):450-457. [10] 谢圆,周建亮,王永. 面向月球车任务规划的环境建模技术[J]. 东南大学学报:自然科学版,2010(S1):292-296.XIE Y,ZHOU J L,WANG Y. Environment modeling for mission planning for lunar rovers[J]. Journal of Southeast University (Natural Science Edition),2010(S1):292-296. -

 下载:
下载:




计量
- 文章访问数:133
- 被引次数:0
