

Research on Foot-Soil Slipping Performance of Footed Robot in Soft Geology on Lunar Surface
-
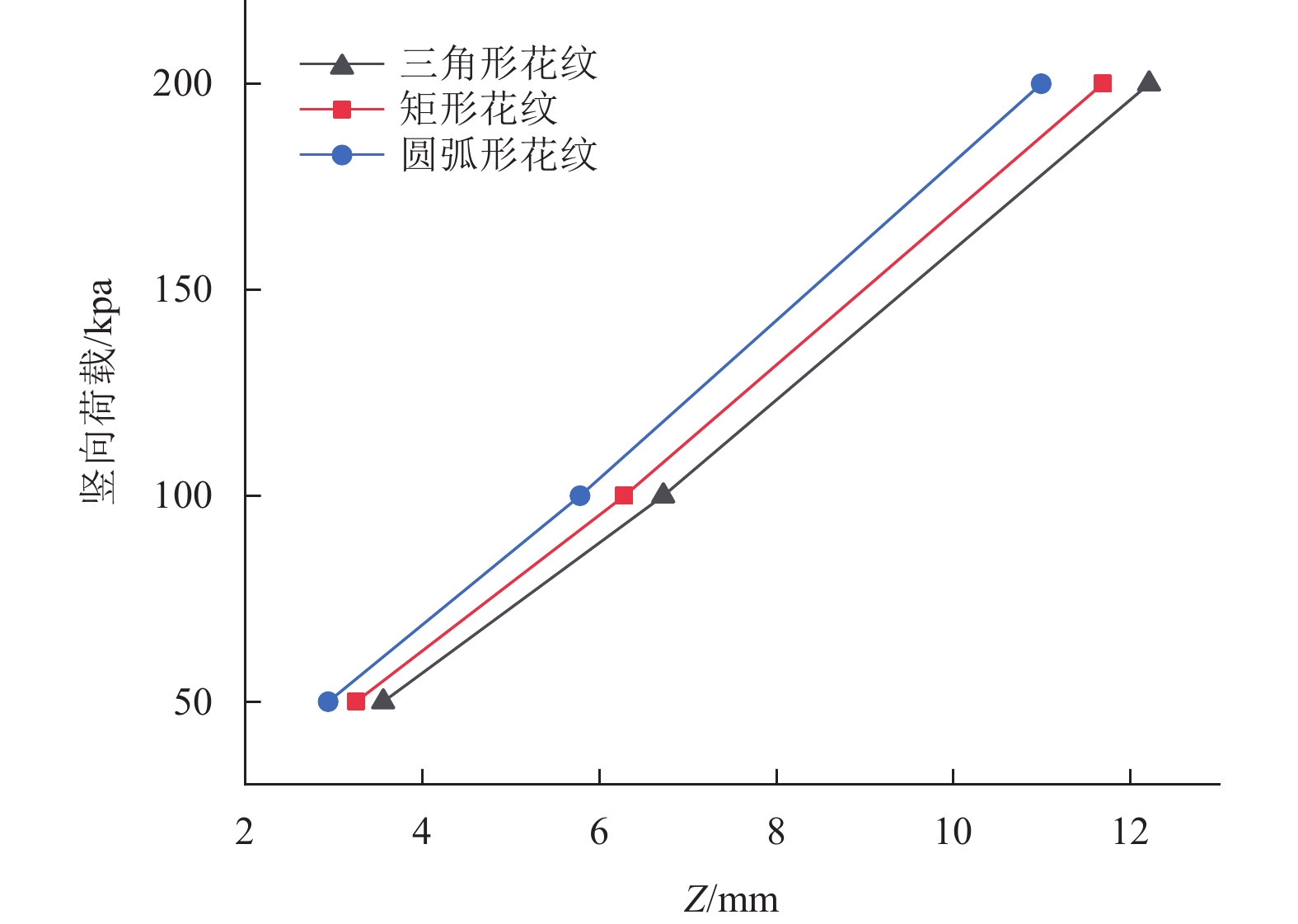
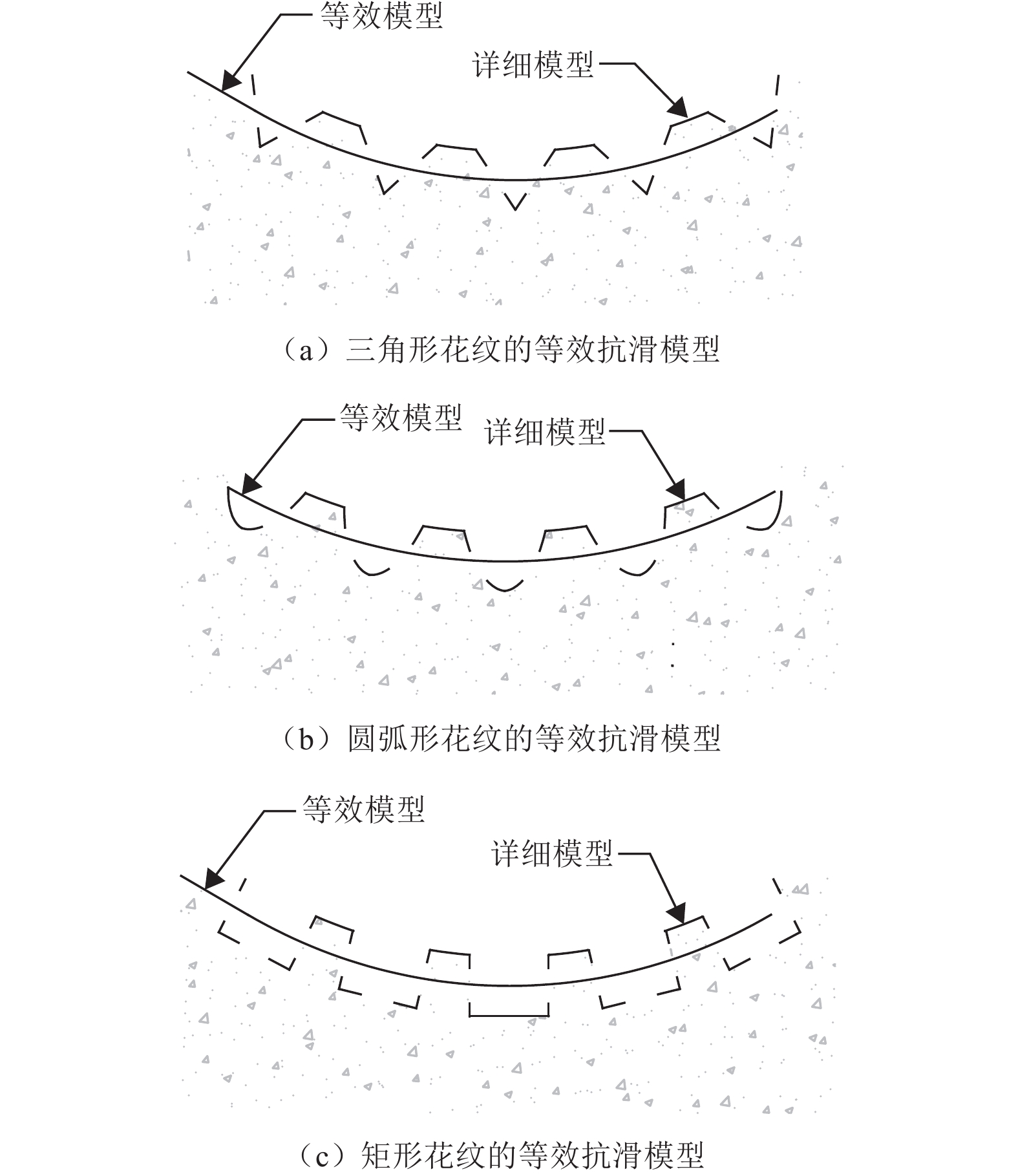
摘要:移动机器人作为月球探索的重要方式,足端力是步态控制的重要参量。为研究足端花纹设计对松散月壤中足-壤相互作用对足端抗滑移性能影响,分别对三角形、圆弧形和矩形3种足端花纹构型进行了防滑性能研究。通过数值仿真对不同花纹构型在相同竖向荷载下界面的抗滑移性能,通过等效原则得到了各花纹构型抗滑移参数。结果表明,足端花纹未完全刺入月壤前,相同竖向荷载作用下圆弧形花纹沉陷量最小,矩形花纹次之,三角形花纹沉陷量最大;同时,圆弧形花纹滑移量、应力峰值亦最小;足–壤接触面抗滑移模型下,相同沉陷量时矩形花纹等效抗剪强度最大其等效摩擦角33.44°、黏聚力2.58 kPa,圆弧形花纹最小其等效摩擦角30.16°、黏聚力2.48 kPa。Abstract:Mobile robot is the backbone of the way of the lunar exploration, its foot end force is an important parameter for gait control. In order to study the effect of foot pattern design on foot-soil interaction in loose lunar soil on the anti-slip performance of the foot end, the anti-slip performance of three foot end pattern configurations was studied: triangle, arc and rectangle. The anti-slip performances of different pattern configurations under the same vertical load were studied through numerical simulation, and the anti-slip parameters of each pattern configuration were obtained through the equivalence principle. The results show that before the foot end pattern is completely pierced into the lunar soil, the circular arc pattern has the smallest settlement amount under the same vertical load, followed by the rectangular pattern with the triangular pattern having the largest settlement amount pattern under the same vertical load. At the same time, the slippage and stress peak of the circular arc pattern are also minimal. Under the anti-slip model of foot-soil contact surface, the equivalent shear strength of the rectangular pattern is the greatest when the same amount of subsidence is the largest, the equivalent friction angle is 33.44°, and the cohesion force 2.58 kpa, the circular arc pattern is the smallest, and its equivalent friction angle is 30.16° and the cohesion force 2.48 kpa.Highlights
● Three kinds of anti-skip patterns on the foot end of the foot robot were designed. ● The interaction model of multi-type pattern foot end and soft was established. ● Slipping force analysis on the foot-soil interface of footed robot. ● Equivalent anti-skip model based on pattern. ● Equivalent angle of friction and equivalent cohesion of soft soil at foot-soil interface under the influence of vertical load. -

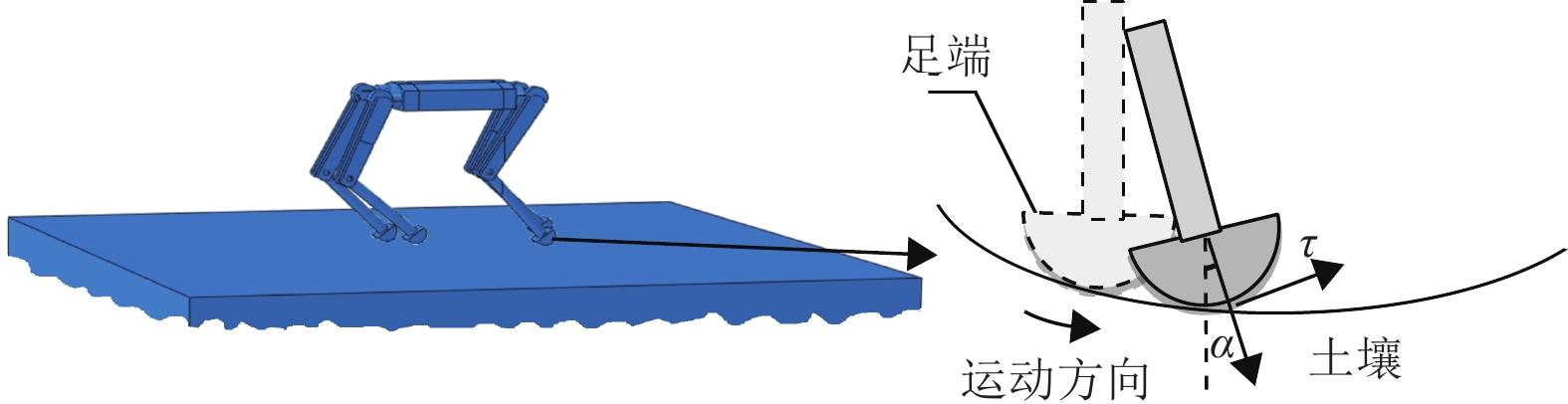
图 1四足机器人整体结构示意图
注:1-机身;2-髋关节;3-大腿;4-膝关节;5-小腿;6-足端。
Fig. 1Schematic diagram of overall structure of four-legged robot

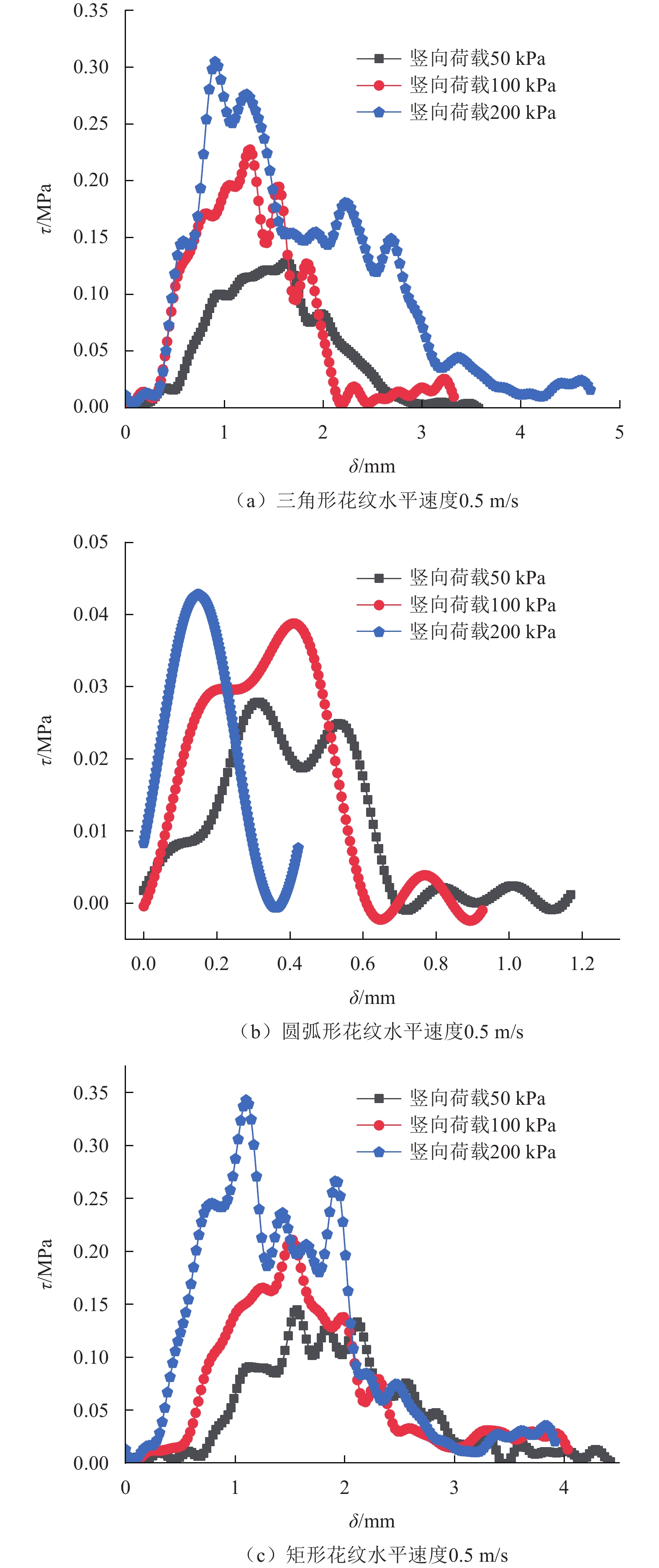
图 8不同花纹在不同竖向荷载下的应力–滑移(τ-δ)曲线
Fig. 8Stress-slip(τ-δ)curves of different patterns under different vertical loads

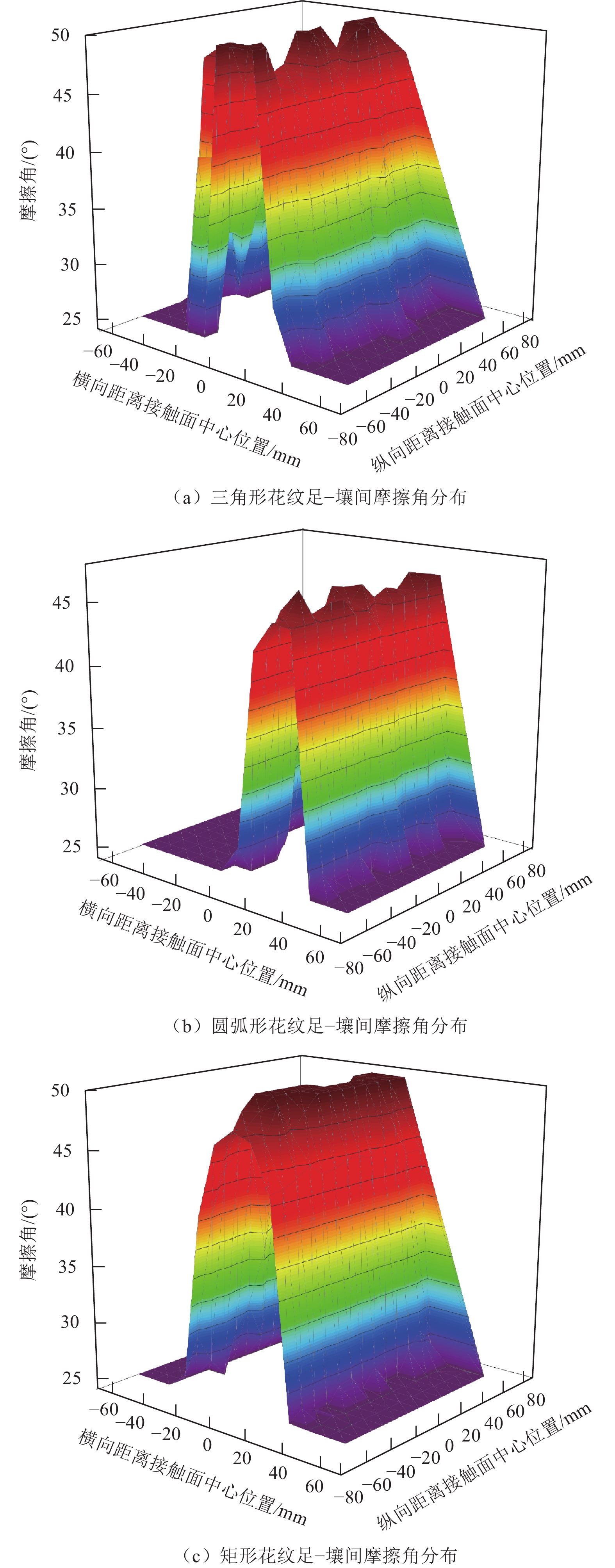
图 11各花纹足–壤接触面摩擦角分布
Fig. 11Distribution of friction angle in foot-soil contact surface of each pattern

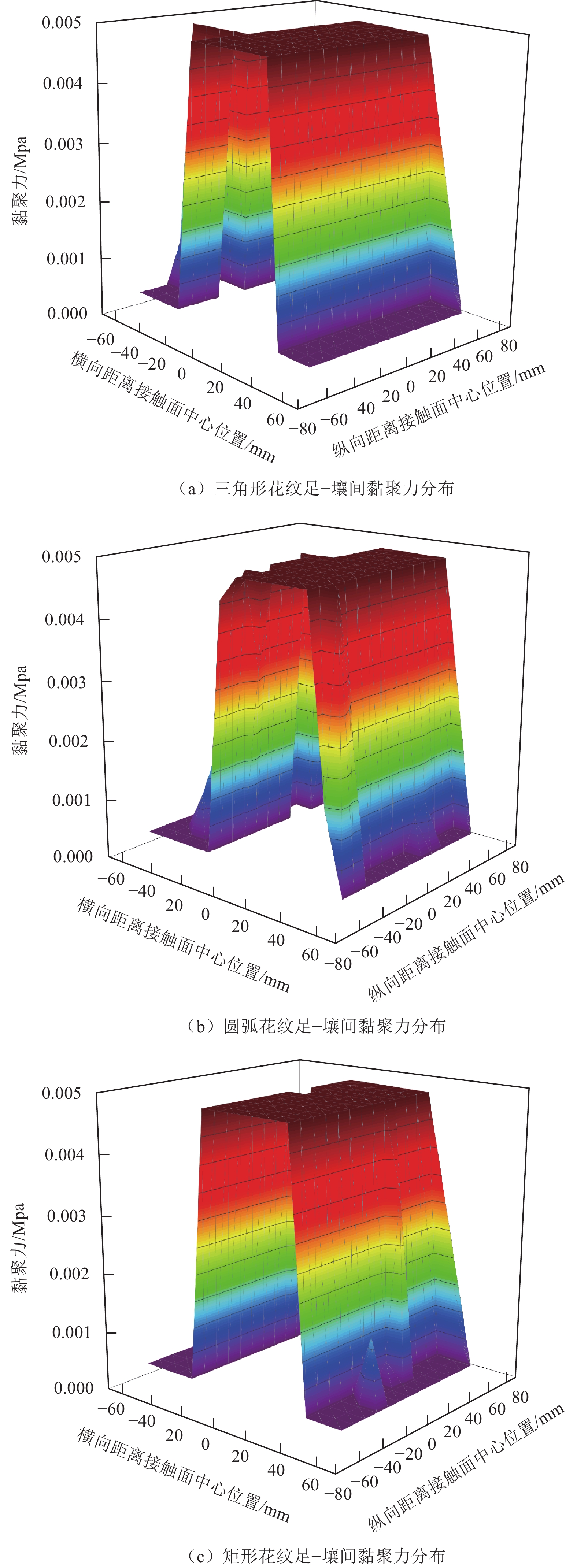
图 12各花纹足–壤接触面黏聚力分布
Fig. 12Cohesion distribution of foot-soil contact surface of each pattern
表 1土壤参数
Table 1Soil parameters
参数类型 土壤参数 杨氏模量/Mpa 48.8 泊松比 0.3 内摩擦角/(°) 42.97 膨胀角/(°) 5 黏聚力/ kpa 1.79 压缩系数 0.19 密度/(kg·m–3) 1660  下载:
导出CSV
下载:
导出CSV
表 2仿真分析工况参数
Table 2Simulation analysis of operating parameters
花纹类型 荷载/ kPa 速度/(m·s–1) 三角形花纹 50 0.5 三角形花纹 100 0.5 三角形花纹 200 0.5 圆弧形花纹 50 0.5 圆弧形花纹 100 0.5 圆弧形花纹 200 0.5 矩形花纹 50 0.5 矩形花纹 100 0.5 矩形花纹 200 0.5 下载:
导出CSV
表 3摩擦角和黏聚力汇总表
Table 3Friction angle and cohesion su mmary table
等效值花纹类型 三角形花纹 圆弧形花纹 矩形花纹 $\varphi$/(°) 32.85 30.16 33.44 c/ kPa 2.49 2.48 2.58 下载:
导出CSV
-
[1] 杜希萌. 我国探月工程四期和深空探测工程将全面拉开序幕[EB/OL]. (2019-01-15)[2022-12-14].https: //china.cnr.cn/yaowen/20190115/t20190115_524482310.shtml. [2] 甘晓. 中科院院士叶培建揭秘探月工程: 2020年后将在月球建立科考站[EB/OL]. (2018-10-23)[2022-12-14].https: //news.sciencenet.cn/sbhtmlnews/2018/10/340123.shtm?id=340123. [3] 杨建中,吴琼,于登云,等. 无人月球科考站构建与运行关键技术初探[J]. 深空探测学报(中英文),2020,7(2):111-117.YANG J Z,WU Q,YU D Y,et al. Preliminary study on key technologies for construction and operation of robotics lunar scientific base[J]. Journal of Deep Space Explortion,2020,7(2):111-117. [4] 张鹏跃. 载人月球车感知型变辐车轮的设计与分析[D]. 重庆: 重庆大学, 2018.ZHANG P Y. Design and analysis of perceptible variable-spoke wheel for manned lunar rover[D]. Chongqing: Chongqing University, 2018. [5] 汪永明,孙应秋,鲍传辉,等. 月球车足部构型参数对其驱动性能的影响研究[J]. 机械工程学报,2015,51(3):37-44.doi:10.3901/JME.2015.03.037WANG Y M,SUN Y Q,BAO C H,et al. Study on the foot configuration parameters of lunar rover and It’s influences on the driving performance[J]. Journal of Mechanical Engineering,2015,51(3):37-44.doi:10.3901/JME.2015.03.037 [6] 陶建国,胡明,高海波,等. 月球车刚性车轮与土壤相互作用的力学模型与测试[J]. 空间工程学报,2008,28(4):340-344.TAO J G,HU M,GAO H B,et al. Modeling and measurement of rigid wheel-soil interacter for a lunar rover[J]. Chinese Journal of Space Science,2008,28(4):340-344. [7] 谷侃锋,王洪光,赵明扬,等. 滑转率对月球车车轮驱动力学特性的影响分析[J]. 计算机仿真,2008,25(6):25-29.doi:10.3969/j.issn.1006-9348.2008.06.008GU K f,WANG H G,ZHAO M y,et al. Influence of wheel slip on the dynamic characteristic of lunar rover wheels[J]. Computer Simulatton,2008,25(6):25-29.doi:10.3969/j.issn.1006-9348.2008.06.008 [8] 王福吉,邹有阳,马建伟,等. 重载足式机器人足底花纹结构优化设计[J]. 一重技术,2018,1(06):42-46.doi:10.3969/j.issn.1673-3355.2018.06.011WANG F J,ZOU Y Y,MA J W,et al. Optimization design of sole pattern structure for heavy-duty legged robot[J]. CFHI Technology,2018,1(06):42-46.doi:10.3969/j.issn.1673-3355.2018.06.011 [9] 李军. 重载机器人高适应性足部的设计与研究[D]. 大连: 大连理工大学, 2016.LI J. The design and research of heavy-duty robot high adaptability foot[D]. Dalian: Dalian University of Technology, 2016. [10] 邹有阳. 六足机器人落足点规划与足底花纹设计[D]. 大连: 大连理工大学, 2019.ZOU Y Y. Landing point planning and foot pattern design of hexapod robot[D]. Dalian: Dalian University of Technology, 2019. [11] 贝旭颖,平雪良,高文研,等. 纵向打滑状态下轮式移动机器人轨迹跟踪控制[J]. 中国机械工程,2018,29(16):1958-1964.doi:10.3969/j.issn.1004-132X.2018.16.011BEI X Y,PING X L,GAO W Y,et al. Trajectory tracking control of wheeled mobile robots under longitudinal slipping conditions[J]. China Mechanical Engineering,2018,29(16):1958-1964.doi:10.3969/j.issn.1004-132X.2018.16.011 [12] 杭建峰. 六足机器人行走打滑的研究[D]. 绵阳: 西南科技大学, 2018.HANG J F. Research on walking and slipping of the hexapod robot[D]. Mianyang: Southwest University of Science and Technology, 2018. [13] 龚成. 月球车的发展状况[J]. 装备机械,2007,1(4):62-65.GONG C. The development of the lunar rover[J]. The Magazine on Equipment Machinery,2007,1(4):62-65. [14] HIROSE S, YONEDA K, TSUKAGOSHI H. Quadruped walking and manipulating robot on a steep slope[C]//IEEE International Conference on Robotics and Automation. Albuquerque, NM, USA: IEEE, 1997. [15] 赵广生. 月球车轮壤作用关系的刚柔结合仿真研究[D]. 长春: 吉林大学, 2012.ZHAO G S. Rigid-flexible combined simulation research on the interaction relationship between wheel and soil of the lunar rover[D]. Changchun: Jilin University, 2012. [16] 凌道盛,蒋祝金,钟世英,等. 着陆器足垫冲击模拟月壤的数值分析[J]. 浙江大学学报,2013,47(07):1171-1177.LING D S,JIANG Z J,ZHONG S Y,et al. Numerical study on i Mpact of lunar lander footpad against simulant lunar soil[J]. Journal of Zhejiang University,2013,47(07):1171-1177. [17] 东南大学等合编. 土力学[M]. 第三版. 北京: 中国建筑工业出版社, 2016. [18] 丁亮. 月/星球车轮地作用地面力学模型及其应用研究[D]. 哈尔滨: 哈尔滨工业大学, 2009.DING L. Wheel-soil interaction terramechanics for lunae/planetary exploration rovers: modeling and application[D]. Harbin: Harbin Institute of Technology, 2009. [19] 吴晓君. 合成月壤与足垫相互作用模型试验研究[D]. 杭州: 浙江大学, 2011.WU X J. Model test study on the interaction between compound luner soil and the footpad[D]. Hangzhou: Zhejiang University, 2011. [20] 林呈祥,凌道盛,钟世英. 模拟月壤抗剪强度试验研究及离散元分析[J]. 岩土力学,2017,38(3):893-901.doi:10.16285/j.rsm.2017.03.035LIN C X,LING D S,ZHONG S Y. Experimental research and discrete element analysis of shear strength of lunar soil simulants[J]. Rock and Soil Mechanics,2017,38(3):893-901.doi:10.16285/j.rsm.2017.03.035 -


 下载:
下载:



计量
- 文章访问数:69
- 被引次数:0
