

 下载:
下载:

-
月球是地球的天然卫星,是距离地球最近的自然天体,是人类进行深空探测的首选目标和中继站[1]。自21世纪以来,为了探测月球,解决众多的科学问题,欧洲航天局(European Space Agency,ESA)“智慧1号”(Smart-1),日本“月女神探测器”(SELenological and ENgineering Explorer,SELENE),印度“月船1号”(Chandrayaan-1)、“月船2号”Chandrayaan-2),美国“月球勘测轨道器”(Lunar Reconnaissance Orbiter,LRO)、“重力回溯及内部结构实验室探测器”(Gravily Recovery And Interior Lalboratory,GRAIL)、“月球大气和粉尘环境探测器”(Lunar Atmosphere and Dust Environment Explorer,LADEE),以色列“起源号”(Beresheet)以及中国“嫦娥一号”~“嫦娥五号”(Chang’E-1~Chang’E-5)等先后开展了多种不同形式的月球探测任务,取得了丰硕的研究成果[2]。“探月工程四期”制定了3个科学目标:月球科学综合研究、月球观测与实验研究、月球资源就位利用实验[3],包括“嫦娥六号”极区采样返回、“嫦娥七号”极区综合勘查、“嫦娥八号”月球科研站的关键技术验证,将建成具备科学探测、科研实验和资源利用技术验证等综合功能的月球科研站[4]。开展载人登月工程可行性的论证工作,为实现中国载人登月奠定基础。
月球被地球潮汐锁定,其自转周期与公转周期相同,从而导致月球总以同一面对着地球[5],因此飞行或着陆于月球背面的探测器无法被地面站直接观测,必须利用更高轨道的探测器进行中继测量。月球中继卫星的设置目前有两种方式:一是环月轨道中继,如日本的SELENE任务;二是地月平动点轨道中继,如中国的“嫦娥四号”任务。
日本月球探测任务SELENE于2007年发射了3颗绕月卫星,分别是低轨主卫星Kaguya、中继子卫星Rstar和甚长基线干涉测量(Very Long Baseline Interferometry,VLBI)子卫星Vstar[6]。该任务利用S波段测速信号通过双程和四程多普勒测速观测值对Rstar和Kaguya跟踪测量[7],同时利用同波束差分VLBI观测值对Vstar和Rsta相对定位测量[8-9],通过消除两颗卫星在传播路径上的系统误差和测站误差,以提高Rstar的定轨精度,其主要科学目标是利用直接获取的月球背面多普勒跟踪数据精确反演月球重力场[10],特别是月球背面的重力场模型[11]。
“嫦娥四号”任务于2018年5月向地月系L2平动点发射了“鹊桥号”中继卫星[12],又于2018年12月向月球背面发射了着陆器和巡视器,实现了在月球背面的软着陆[13]。由于航天器在地月系L2平动点附近飞行对月球背面持续可见[14],所以在平动点附近布设中继卫星能够实现与月球背面探测器的数据通信[15]。“嫦娥四号”利用“鹊桥”中继星实现了与月球背面探测器的中继通信[12],并且利用测距、多普勒测速以及VLBI时延、时延率等观测值对中继卫星精密定轨[16]。但“嫦娥四号”着陆器和中继星之间没有测控信号,因此没有开展利用中继信号进行定轨定位的工作。
月球南极存在极昼极夜的现象,有连续半年的日照时间,可供一些仪器设备连续工作。此外,月球南极的永久阴影区可能存在水冰等其它潜在资源[17]。为长时间对地球进行大动态、全方位、稳定的观测,并且对月球进一步探测,以及以月球为跳板,前往更远的深空、更远的天体,在月球建设科研站是十分必要的。
黄勇等[18]利用VLBI和X频段测距测速观测值实现了对“嫦娥三号”着陆器的轨道确定和月面定位,曹建峰等[19]利用多普勒测速数据实现了对“嫦娥四号”着陆器在环月飞行阶段的轨道确定,王镓等[20]针对着陆器下降期间的序列影像利用图像匹配和几何变换的方法实现了对“嫦娥四号”着陆器的月面定位。“嫦娥三号”着陆于月球正面,可利用地面站直接观测,而“嫦娥四号”着陆于月球背面,因此仅能对其环月飞行阶段采用轨道跟踪数据定轨,着陆后受观测条件的限制,只能利用影像数据确定二维坐标,无法确定着陆器的三维坐标。
未来中国拟在月球南极着陆和巡视勘查,因月球自身遮挡导致直接观测链路受限,所以需要为在月球南极着陆区工作的探测器提供连续的中继通信测控服务[17]。研究月球四程中继测量对探月工程四期的开展具有重要意义。
本文同时利用两种四程中继跟踪的方案,实现了同时确定两颗卫星的轨道和着陆器的三维坐标,并且分析比较了不同观测方案下双程与四程观测模型对月球探测器定轨定位精度的影响。
-
本文使用的四程中继测量模型是基于环月轨道中继的,分为两种,一种是四程星间观测模型,即将高轨卫星跟踪低轨卫星[21](SST-hl)技术和地面站跟踪卫星技术相结合,实现对月球背面卫星的跟踪观测[22];另一种是四程着陆器观测模型,其与四程星间观测模型类似,只是将中继跟踪目标由低轨卫星换成着陆器[23]。
四程中继跟踪测量模型的主要观测过程如图1所示,地面站
$ {t}_{1} $ 时刻向中继卫星发送上行信号,在$ {t}_{2} $ 时刻经前向链路通过中继卫星并于$ {t}_{3} $ 时刻到达低轨卫星/着陆器,低轨卫星/着陆器对信号处理后,沿反向链路在$ {t}_{4} $ 时刻经过中继卫星,最后于$ {t}_{5} $ 时刻返回至地面站,即观测链路为地面站−中继卫星−低轨卫星/着陆器−中继卫星−地面站。四程测距观测值为[10]
图 1四程中继测量示意图
Figure 1.Four-way relay measurement schematic
$$ \begin{split} {R}_{4w}=\;&\frac{1}{2}({R}_{1}+c\cdot {RLT}_{12}+{R}_{2}+{R}_{3} +{R}_{4}+c\cdot {RLT}_{45})+\varepsilon =\\ &\frac{1}{2}\Bigg(\left|{{\boldsymbol r}}_{\mathrm{T}\mathrm{i}\mathrm{n}\mathrm{g}}({t}_{2})-{{\boldsymbol r}}_{\mathrm{T}\mathrm{S}}\left({t}_{1}\right)\right|+c\cdot {RLT}_{12} +\left|{{\boldsymbol r}}_{\mathrm{T}\mathrm{e}\mathrm{d}}({t}_{3})-\right.\\ &\left.{{\boldsymbol r}}_{\mathrm{T}\mathrm{i}\mathrm{n}\mathrm{g}}\left({t}_{2}\right)\right| +\left|{{\boldsymbol r}}_{\mathrm{T}\mathrm{i}\mathrm{n}\mathrm{g}}({t}_{4})-{{\boldsymbol r}}_{\mathrm{T}\mathrm{e}\mathrm{d}}\left({t}_{3}\right)\right| +\left|{{\boldsymbol r}}_{\mathrm{T}\mathrm{S}}({t}_{5})-\right.\\&\left.{{\boldsymbol r}}_{\mathrm{T}\mathrm{i}\mathrm{n}\mathrm{g}}\left({t}_{4}\right)\right|+c\cdot {RLT}_{45}\Bigg) +\varepsilon \\[-18pt] \end{split}$$ (1) 其中:
$ {R}_{i} $ ($ i $ =1,2,3,4)为信号在每一段链路的距离;$ {RLT}_{12} $ 和$ {RLT}_{45} $ 是发射和接收信号时地面站和中继星间的相对论时延;$\varepsilon$ 为测量噪声;${\boldsymbol r}$ 为位置矢量;下标TS、Ting、Ted分别表示地面站、跟踪探测器(中继卫星)和被跟踪探测器(低轨卫星/着陆器)。设T为多普勒积分周期,${R}_{\rm s}\mathrm{和}{R}_{\rm e}$ 分别表示积分开始和结束时对应的测距观测值,则四程多普勒测速观测值为$$ {RR}_{4w}=\frac{{R}_{\rm e}-{R}_{\rm s}}{T} $$ (2) ${\mathit{\boldsymbol X}}_{{\rm R}{\rm S}}^{0}$ 是中继卫星初轨,${{\boldsymbol X}}_{{\rm R}{\rm S}}$ 是获取观测值时中继卫星的轨道,则四程测距观测值对中继卫星初轨的偏导数为$$ \begin{split} \frac{\partial {R}_{4w}}{\partial {{\boldsymbol X}}_{{\rm R}{\rm S}}^{0}}=\;&\frac{\partial {R}_{4w}}{\partial {{\boldsymbol X}}_{{\rm R}{\rm S}}}\times \frac{\partial {\boldsymbol{X}}_{{\rm R}{\rm S}}}{\partial {\boldsymbol{X}}_{{\rm R}{\rm S}}^{0}} =\\ &\frac{\text{1}}{\text{2}}\left(\frac{\text{∂}{{R}}_{\text{1}}}{\text{∂}{\boldsymbol{{X}}}_{\rm {RS}}}\text+\frac{\text{∂}{{R}}_{\text{2}}}{\text{∂}{\boldsymbol{{X}}}_{\rm {RS}}}\text+\frac{\text{∂}{{R}}_{\text{3}}}{\text{∂}{\boldsymbol{{X}}}_{\rm {RS}}}\text+\frac{\text{∂}{{R}}_{\text{4}}}{\text{∂}{\boldsymbol{{X}}}_{\rm {RS}}}\right)\times\frac{\text{∂}{\boldsymbol{{X}}}_{\rm {RS}}}{\text{∂}{\boldsymbol{{X}}}_{\rm {RS}}^{\text{0}}} \end{split} $$ (3) ${\boldsymbol{X}}_{\mathrm{L}\mathrm{S}}^{0}$ 是低轨卫星初轨;${\boldsymbol{X}}_{\mathrm{L}\mathrm{S}}$ 是获取观测值时低轨卫星的轨道,则四程测距观测值对低轨卫星初轨的偏导数为$$ \frac{\partial {R}_{4w}}{\partial {\boldsymbol{X}}_{\mathrm{L}\mathrm{S}}^{0}}=\frac{\partial {R}_{4w}}{\partial {\boldsymbol{X}}_{\mathrm{L}\mathrm{S}}}\times \frac{\partial {\boldsymbol{X}}_{\mathrm{L}\mathrm{S}}}{\partial {\boldsymbol{X}}_{\mathrm{L}\mathrm{S}}^{0}} =\frac{1}{2}\left(\frac{\partial {R}_{2}}{\partial {\boldsymbol{X}}_{\mathrm{L}\mathrm{S}}}+\frac{\partial {R}_{3}}{\partial {\boldsymbol{X}}_{\mathrm{L}\mathrm{S}}}\right)\times \frac{\partial {\boldsymbol{X}}_{\mathrm{L}\mathrm{S}}}{\partial {\boldsymbol{X}}_{\mathrm{L}\mathrm{S}}^{0}} $$ (4) ${\boldsymbol{X}}^{0}$ 表示中继卫星与低轨卫星的初轨;$\boldsymbol{X}$ 表示获取观测值时对应的轨道,则四程多普勒测速观测值对两颗卫星轨道的偏导数为$$ \frac{\partial {RR}_{4w}}{\partial {\boldsymbol{X}}^{0}}=\frac{\partial {RR}_{4w}}{\partial \boldsymbol{X}}\times \frac{\partial \boldsymbol{X}}{\partial {\boldsymbol{X}}^{0}}=\frac{1}{T}\left(\frac{\partial {R}_{e}}{\partial \boldsymbol{X}}-\frac{\partial {R}_{s}}{\partial \boldsymbol{X}}\right)\times \frac{\partial \boldsymbol{X}}{\partial {\boldsymbol{X}}^{0}} $$ (5) ${\boldsymbol{r}}_{\mathrm{L}\mathrm{D}\mathrm{R}}$ 是着陆器位置矢量,则四程测距观测值对着陆器位置矢量的偏导数为$$ \frac{\partial {R}_{4w}}{\partial {\boldsymbol{r}}_{\mathrm{L}\mathrm{D}\mathrm{R}}}=\frac{1}{2}\left(\frac{\partial {R}_{2}}{\partial {\boldsymbol{r}}_{\mathrm{L}\mathrm{D}\mathrm{R}}}+\frac{\partial {R}_{3}}{\partial {\boldsymbol{r}}_{\mathrm{L}\mathrm{D}\mathrm{R}}}\right) $$ (6) 四程多普勒测速观测值对着陆器位置矢量的偏导数为
$$ \frac{\partial {RR}_{4w}}{\partial {\boldsymbol{r}}_{\mathrm{L}\mathrm{D}\mathrm{R}}}=\frac{1}{T}\left(\frac{\partial {R}_{\rm e}}{\partial {\boldsymbol{r}}_{\mathrm{L}\mathrm{D}\mathrm{R}}}-\frac{\partial {R}_{\rm s}}{\partial {\boldsymbol{r}}_{\mathrm{L}\mathrm{D}\mathrm{R}}}\right) $$ (7) -
本文选取月球南极作为着陆器的初始位置,利用月球探测定轨定位软件LUGREAS分析,精密定轨所采用的动力学模型参数见表1,卫星及着陆器的初始状态向量见表2,卫星轨道根数见表3,中继星轨道为倾斜椭圆轨道,低轨星轨道为极地近圆轨道,定轨参数设置见表4。观测时间选择2024.01.24 4:00:00.00 UTC,观测时长为1 d,采用的月球重力场模型为GSFC对GRAIL数据解算得到的GRGM660PRIM[24],待估参数包括卫星初始状态向量和着陆器坐标。
表 1精密定轨采用的动力学模型及参数
Table 1.Force models and parameters in precise orbit determination
模型名称 模型选择 重力场模型 月球重力场模型 GRGM660PRIM(截断至75阶次) N体摄动 太阳及8大行星(天体位置通过历表DE 421获得) 固体潮摄动 太阳、地球引起的固体潮摄动(仅考虑二阶LOVE数) 相对论摄动 考虑Schwarzschild项和测地岁差项 太阳光压 固定面质比,Cr= 1.25 -
为探究四程观测模型对月球探测器定轨定位精度的具体影响,下面通过对比不同情况下的精密定轨及着陆器定位的结果来进行分析,实验过程中,在模拟观测值时对探测器位置矢量的X、Y、Z三轴各添加5 m的偏差。精密定轨采用多普勒测速观测值,包括不同观测值组合及不同噪声水平两种情况,着陆器定位包括不同噪声水平以及不同观测弧长两种情况,定轨精度采用定轨前后全弧段轨道误差的RMS来表示。
表 2中继卫星、低轨卫星及着陆器初始状态向量
Table 2.Initial state vectors of relay satellite, low-orbit satellite, and lander
状态向量 中继卫星 低轨卫星 着陆器 x/km 357.9608 –437.35 0 y/km –1780.321 1870.656 0 z/km 925.0752 –249.185 –1738 vx/(km·s–1) 1.9307 –0.07594 — vy/(km·s–1) 0.494052 0.19293 — vz/(km·s–1) 0.203716 1.577047 — 表 3中继卫星与低轨卫星轨道根数
Table 3.Orbital elements of relay satellite and low-orbit satellite
轨道根数 中继卫星 低轨卫星 a/km 6141.289 1936.574 e 0.668 0.0005 i/(°) 27.725 88.927 Ω/(°) 205.569 103.298 w/(°) 77.377 221.783 M/(°) 359.999 130.783 表 4定轨参数设置
Table 4.Configuration of precise orbit determination
名称 详细信息 测量模型 双程测速 2W RR 四程星间测速 4W IS RR 四程着陆器测速 4W OL RR 地面跟踪站 喀什站(76.13°E,36.41°N) 采样间隔 10 s 截止高度角 5° 观测弧长 1 d 坐标系 月心J2000 待估参数 12个卫星初始状态向量,3个着陆器坐标 -
实验方案分为4组,方案Ⅰ:双程测速(2W RR);方案Ⅱ:双程测速和四程着陆器测速(2W RR+4W OL RR);方案Ⅲ:双程测速和四程星间测速(2W RR+4W IS RR);方案Ⅳ:双程测速、四程星间测速和四程着陆器测速(2W RR+4W IS RR+4W OL RR),观测噪声均设置为1 mm/s,具体定轨结果见表5。
表 5卫星轨道误差的RMS
Table 5.RMS of satellite orbit error
实验方案 Ⅰ Ⅱ Ⅲ Ⅳ 中继卫星/m 1.535 14.332 117.617 11.384 低轨卫星/m 8.128 8.128 18.967 5.439 从表5中可以看出,中继星仅使用双程观测值的定轨精度最高,加入单一四程观测值后,受到着陆器的位置误差和低轨星的轨道误差的影响导致定轨精度下降,且低轨星对中继星的影响更大,方案Ⅳ相比方案III有显著的提升,相比方案Ⅱ也有小幅提升,即四程着陆器观测值能显著减少低轨星的轨道误差的影响,四程星间观测值也能一定程度上减少着陆器位置误差的影响。低轨星仅使用双程观测值时受限于月球遮挡,定轨精度较低,在加入四程星间观测值后,受到中继星的轨道误差影响导致定轨精度降低,但在加入四程着陆器观测值后,定轨精度相比方案I更高,即四程着陆器观测值能显著减少中继星的轨道误差影响。
-
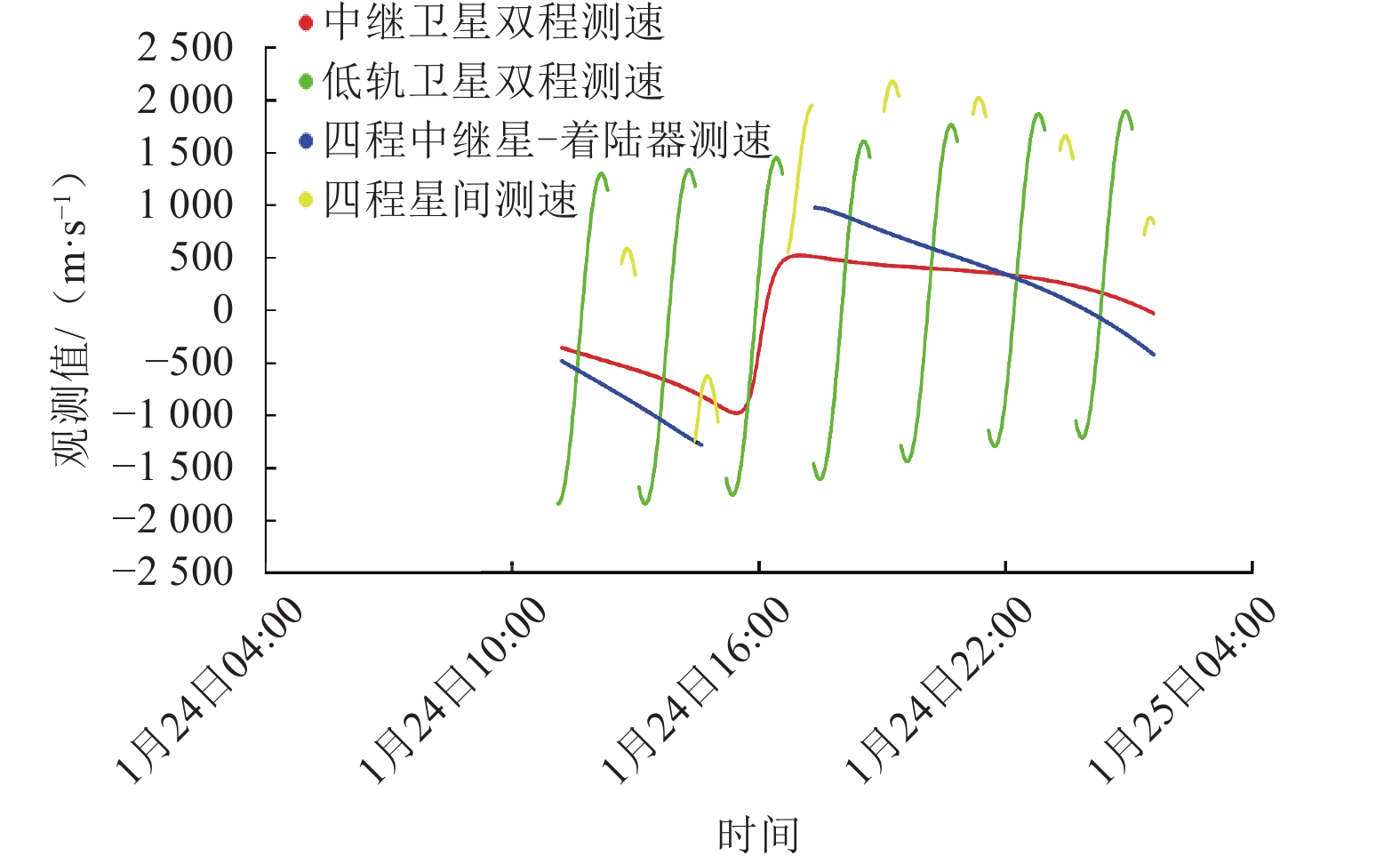
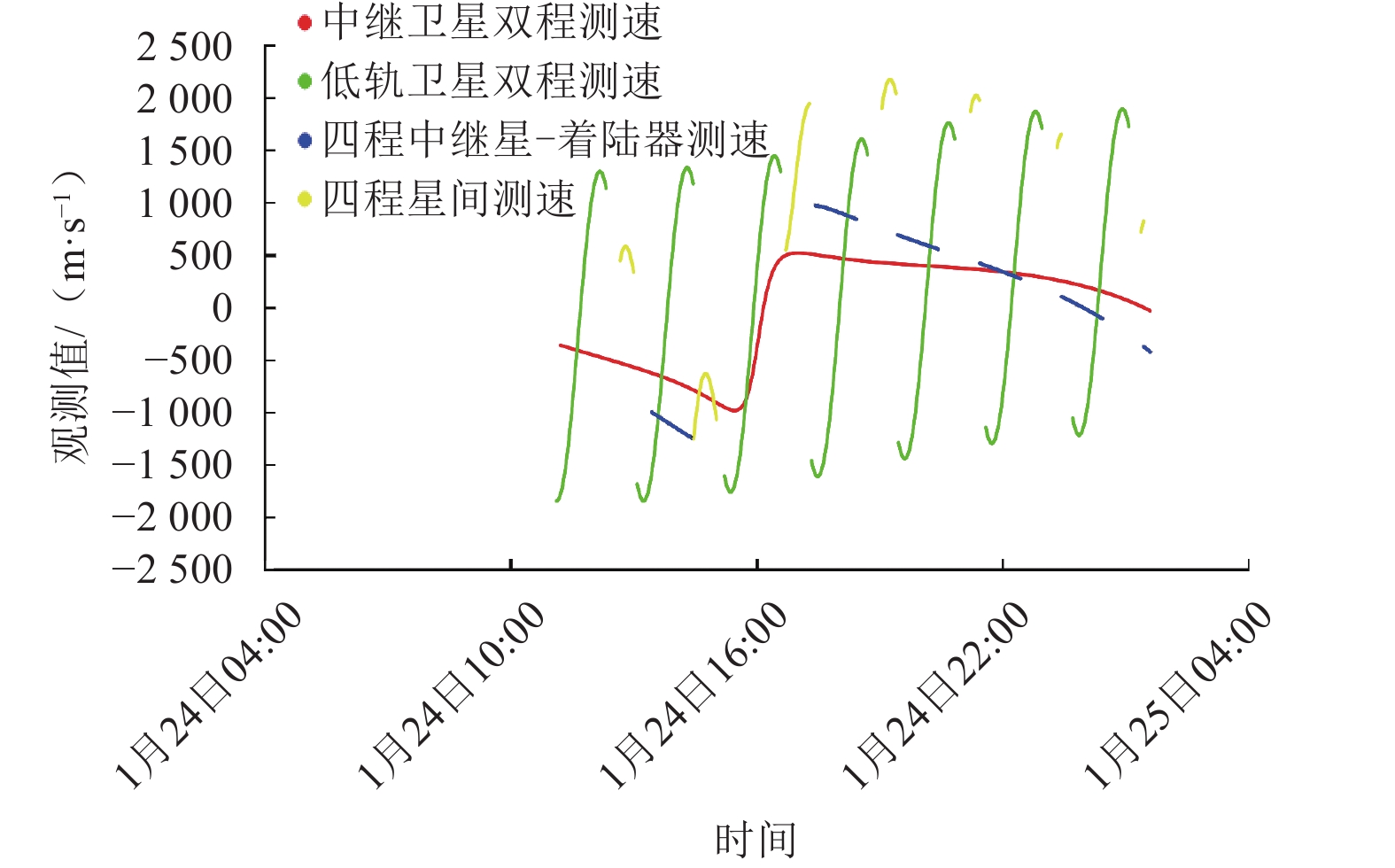
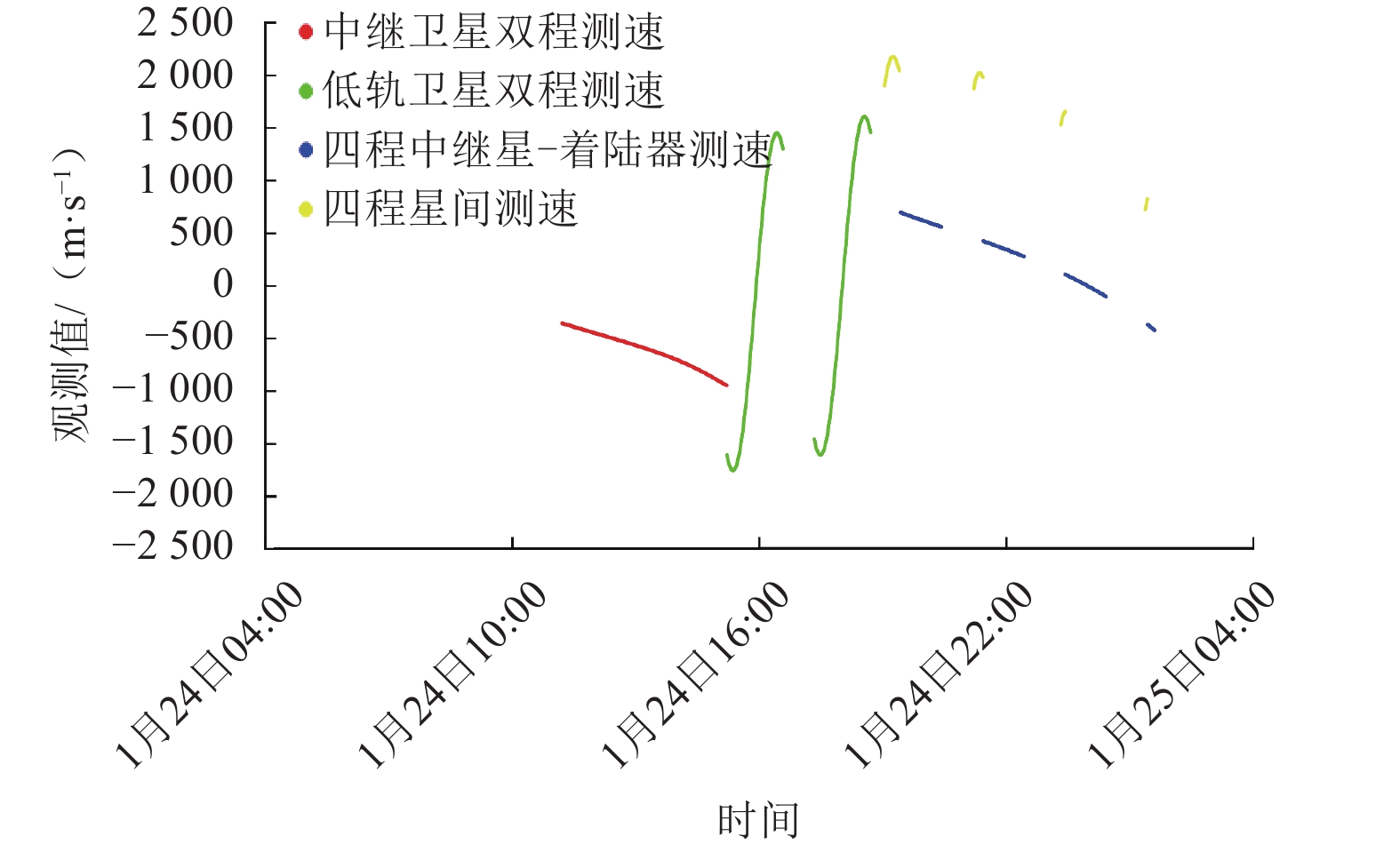
为控制实验变量,不限制观测值的种类,均包含双程和四程观测值。为了更加贴合真实观测情况,设置了3种不同的交替观测模式:正常观测、四程交替观测以及全交替观测。正常观测是指同时测量所有观测值;四程交替观测为双程观测值正常观测,四程观测值交替观测,各观测段1 h;全交替观测为所有观测值交替观测,按照中继卫星双程测速、低轨卫星双程测速、四程交替观测的顺序。实验方案分为3组。方案Ⅰ:双程测速0.1 mm/s,四程测速1 mm/s;方案Ⅱ:双程测速1 mm/s,四程测速1 mm/s;方案Ⅲ:双程测速1 mm/s,四程测速5 mm/s。不同观测模式的观测值分布如图2~4所示,每种交替情况的观测值数量见表6。下面将研究不同噪声水平对定轨精度的影响。

图 2正常观测下观测值分布
Figure 2.Distribution of observation values under normal observation

图 3四程交替观测下观测值分布
Figure 3.Distribution of observation values under four-way alternate observation

图 4全交替观测下观测值分布
Figure 4.Distribution of observations under full alternate observation
表 6不同观测模式下的观测值数量
Table 6.Number of observations in different observation modes
观测模式 正常观测 四程交替观测 全交替观测 中继卫星双程测速 5 181 5 181 1 440 低轨卫星双程测速 3 397 3 397 985 四程星间测速 971 805 271 四程着陆器测速 4 191 1 862 1 142 从表7可以看出,正常观测下,3种方案的定轨精度与所添加的噪声水平具有强相关性,方案Ⅰ最高,方案Ⅱ次之,方案Ⅲ最低。中继卫星的RMS变化幅度在方案Ⅰ与Ⅱ之间比方案Ⅱ与Ⅲ之间更大,即中继卫星的定轨精度对于双程模型的噪声变化更加敏感。低轨卫星的RMS变化幅度在方案Ⅱ与Ⅲ之间比方案Ⅰ与Ⅱ之间更大,即低轨卫星对四程模型的噪声变化更敏感。为确认这种情况,下面将在另外两组观测模式下继续对比分析。
表 7正常观测下的卫星轨道误差RMS
Table 7.RMS of satellite orbit error under normal observation
实验方案 Ⅰ Ⅱ Ⅲ 中继卫星/m 4.428 11.384 16.011 低轨卫星/m 1.918 5.439 12.446 从表8~9可以看出,在四程交替和全交替模式下,中继卫星的RMS变化幅度在方案Ⅰ与Ⅱ之间比方案Ⅱ与Ⅲ之间更大,即中继卫星对双程模型的噪声变化更加敏感;低轨卫星的RMS变化幅度在四程交替模式下,方案II与Ⅲ之间的比方案Ⅰ与Ⅱ之间更大,但在全交替模式下,方案Ⅰ与Ⅱ之间比方案Ⅱ与Ⅲ之间更大,四程星间观测值的数量在四程交替和正常观测之间变化较小,但全交替模式和四程交替之间变化较大,即低轨卫星的噪声敏感情况与四程观测值的数量有关。
表 8四程交替观测下的卫星轨道误差RMS
Table 8.RMS of satellite orbit error under four-way alternate observation
实验方案 Ⅰ Ⅱ Ⅲ 中继卫星/m 2.459 19.558 14.855 低轨卫星/m 1.772 6.015 12.425 表 9全交替观测下的卫星轨道误差RMS
Table 9.RMS of satellite orbit error under full alternate observation
实验方案 Ⅰ Ⅱ Ⅲ 中继卫星/m 37.702 390.731 76.5158 低轨卫星/m 9.710 80.060 26.0293 此外,两颗卫星的定轨精度在正常观测与四程交替观测下的差别并不大,但在全交替模式下有较大的差异,即在定轨过程中,双程观测模型对定轨精度的影响更大。方案Ⅰ与Ⅲ在四程交替观测下定轨精度高于正常观测,即四程观测值数量减少,使得两颗卫星的轨道误差和着陆器的位置误差对于定轨精度影响下降。
-
首先研究四程星间观测值对着陆器的影响,实验方案分为两组。方案Ⅰ:双程测速1 mm/s,四程测速1 mm/s;方案Ⅱ:双程和四程着陆器测速1 mm/s,四程星间测速5 mm/s,并将其与中继星定轨精度对比。具体结果见表10。
表 10着陆器位置误差以及中继卫星的轨道误差RMS
Table 10.Lander position error values and RMS of relay-satellite orbit error
实验方案 Ⅰ Ⅱ ΔP/m 2.230 13.459 RMS/m 4.428 14.798 由表10可知着陆器定位精度与四程星间模型的噪声水平相关,也与中继星定轨精度相关。研究双程模型与四程模型的噪声水平对着陆器定位精度的影响以及中继卫星轨道误差与着陆器位置误差的关联。对双程与四程模型添加不同水平噪声,并设置3种观测模式,实验方案分为3组:方案Ⅰ:双程测速0.1 mm/s,四程测速1 mm/s;方案Ⅱ:双程测速1 mm/s,四程测速1 mm/s;方案III:双程测速1 mm/s,四程测速5 mm/s,具体结果见表11。
表 11着陆器位置误差和中继卫星的轨道误差RMS
Table 11.Lander position error values and RMS of relay-satellite orbit error
实验方案 Ⅰ Ⅱ Ⅲ 正常观测 ΔP/m 2.230 2.748 5.337 RMS/m 4.428 11.384 16.011 四程交替观测 ΔP/m 1.257 2.596 2.660 RMS/m 2.459 19.558 14.855 全交替观测 ΔP/m 9.559 68.176 92.783 RMS/m 37.702 390.71 76.5158 由表11可以看出,着陆器定位精度变化与噪声变化相同,同一观测模式下的定位精度方案Ⅰ最高,方案III最低,同一方案下的定位精度,正常观测最高,全交替观测最低,着陆器的定位精度与中继星的定轨精度具有较强相关性。正常观测的着陆器的位置误差变化幅度在方案Ⅱ与Ⅲ之间比方案Ⅰ与Ⅱ之间更大,四程交替以及全交替观测的着陆器的位置误差变化幅度在方案Ⅰ与Ⅱ之间比方案Ⅱ与Ⅲ之间更大,即着陆器定位精度的噪声敏感情况与四程观测值数量相关。
-
下面研究不同观测弧长对着陆器定位精度的影响,观测值包括双程与四程模型,测量噪声均设置为1 mm/s,观测弧长分为1 、7 和15 d,定位结果见表12。
表 12不同观测弧长下着陆器位置误差
Table 12.Lander position error values for different observation arc lengths
观测弧长 1 d 7 d 15 d ΔP/m 2.748 0.139 0.338 从表12可以看出,当观测弧长从1 d增加至7 d时,着陆器的位置误差从m级降低至dm级,但观测弧长从7 d增加至15 d时,着陆器的位置误差则从14 cm增加到至34 cm,即定位精度受到探测器的先验位置误差引起的测量误差累积的影响。
-
本文就四程中继测量模型对月球探测器定轨定位精度的影响进行了仿真分析,得出如下结论。
1)仅用双程模型时,低轨卫星的定轨精度较差,加入单一的四程模型后两颗卫星的定轨精度下降,而同时应用两种四程模型对两颗卫星的定轨精度有较好约束。
2)中继卫星对双程模型的噪声水平更敏感,而低轨卫星与着陆器的噪声敏感情况与四程观测值数量相关。
3)着陆器的定位精度会受到中继卫星和低轨卫星的影响,并会随着观测弧长的增加在短时间内提升,但会在观测弧长较长时下降。
文中的仿真分析,没有考虑光压模型误差、重力场模型误差,以及测控系统链路噪声、热噪声等因素,计算结果偏理想化。但本文的定量分析,仍可以用于评估引入中继测量模式之后,对探测器定轨定位精度的影响。未来将进一步开展月球重力场、月球历表、月面控制网等多学科研究,进而丰富“嫦娥”四期科学产出。
Research on Lunar Four-Way Relay Measurement Mode of Orbit Determination and Positioning Method
-
摘要:基于在月球南极地区探测因遮挡导致测控链路受限问题,设计了同时采用两种四程中继测量模式的方案,并从观测值组合及噪声水平两个方面,对双程和四程测量模式在月球探测器定轨定位中的作用进行了分析。结果表明,同时应用两种四程模型对两颗卫星的定轨精度有较好约束,中继卫星对双程模型噪声更敏感,低轨卫星和着陆器的噪声敏感情况与四程观测值数量相关,着陆器的定位精度与两颗卫星的定轨精度相关,可为中继测量模式在探月工程四期的应用提供参考。Abstract:To deal with the limitation of the measurement and control link caused by occlusion in the detection in the lunar south polar region, a scheme of simultaneously applying two four-way relay measurement models was designed and the role of two-way and four-way measurement models in the lunar probe orbit determination and positioning in terms of the combination of observations and noise level was analyzed, The results show that simultaneous application of the two four-way models has better constraints on the orbiting accuracy of the two satellites, the relay satellite is more sensitive to the noise of the two-way model, the noise sensitivity of the low-orbit satellite and the lander is related to the number of four-way observations, and the positioning accuracy of the lander is related to the orbiting accuracy of the two satellites, which can provide a reference for the application of the relay measurement model in the fourth phase of the lunar exploration project.Highlights
● The simulation of precise orbit determination of relay satellite, low-orbit satellite, and lander positioning is done. ● The effects of different combinations of observation models and noise levels on orbiting accuracy of lunar orbiting satellites are analyzed. ● The effects of noise levels of different observation models and different observation arc lengths on positioning accuracy of the lunar lander are analyzed. -
图 3四程交替观测下观测值分布
Fig. 3Distribution of observation values under four-way alternate observation
表 1精密定轨采用的动力学模型及参数
Table 1Force models and parameters in precise orbit determination
模型名称 模型选择 重力场模型 月球重力场模型 GRGM660PRIM(截断至75阶次) N体摄动 太阳及8大行星(天体位置通过历表DE 421获得) 固体潮摄动 太阳、地球引起的固体潮摄动(仅考虑二阶LOVE数) 相对论摄动 考虑Schwarzschild项和测地岁差项 太阳光压 固定面质比,Cr= 1.25  下载:
导出CSV
下载:
导出CSV
表 2中继卫星、低轨卫星及着陆器初始状态向量
Table 2Initial state vectors of relay satellite, low-orbit satellite, and lander
状态向量 中继卫星 低轨卫星 着陆器 x/km 357.9608 –437.35 0 y/km –1780.321 1870.656 0 z/km 925.0752 –249.185 –1738 vx/(km·s–1) 1.9307 –0.07594 — vy/(km·s–1) 0.494052 0.19293 — vz/(km·s–1) 0.203716 1.577047 — 下载:
导出CSV
表 3中继卫星与低轨卫星轨道根数
Table 3Orbital elements of relay satellite and low-orbit satellite
轨道根数 中继卫星 低轨卫星 a/km 6141.289 1936.574 e 0.668 0.0005 i/(°) 27.725 88.927 Ω/(°) 205.569 103.298 w/(°) 77.377 221.783 M/(°) 359.999 130.783 下载:
导出CSV
表 4定轨参数设置
Table 4Configuration of precise orbit determination
名称 详细信息 测量模型 双程测速 2W RR 四程星间测速 4W IS RR 四程着陆器测速 4W OL RR 地面跟踪站 喀什站(76.13°E,36.41°N) 采样间隔 10 s 截止高度角 5° 观测弧长 1 d 坐标系 月心J2000 待估参数 12个卫星初始状态向量,3个着陆器坐标 下载:
导出CSV
表 5卫星轨道误差的RMS
Table 5RMS of satellite orbit error
实验方案 Ⅰ Ⅱ Ⅲ Ⅳ 中继卫星/m 1.535 14.332 117.617 11.384 低轨卫星/m 8.128 8.128 18.967 5.439 下载:
导出CSV
表 6不同观测模式下的观测值数量
Table 6Number of observations in different observation modes
观测模式 正常观测 四程交替观测 全交替观测 中继卫星双程测速 5 181 5 181 1 440 低轨卫星双程测速 3 397 3 397 985 四程星间测速 971 805 271 四程着陆器测速 4 191 1 862 1 142 下载:
导出CSV
表 7正常观测下的卫星轨道误差RMS
Table 7RMS of satellite orbit error under normal observation
实验方案 Ⅰ Ⅱ Ⅲ 中继卫星/m 4.428 11.384 16.011 低轨卫星/m 1.918 5.439 12.446 下载:
导出CSV
表 8四程交替观测下的卫星轨道误差RMS
Table 8RMS of satellite orbit error under four-way alternate observation
实验方案 Ⅰ Ⅱ Ⅲ 中继卫星/m 2.459 19.558 14.855 低轨卫星/m 1.772 6.015 12.425 下载:
导出CSV
表 9全交替观测下的卫星轨道误差RMS
Table 9RMS of satellite orbit error under full alternate observation
实验方案 Ⅰ Ⅱ Ⅲ 中继卫星/m 37.702 390.731 76.5158 低轨卫星/m 9.710 80.060 26.0293 下载:
导出CSV
表 10着陆器位置误差以及中继卫星的轨道误差RMS
Table 10Lander position error values and RMS of relay-satellite orbit error
实验方案 Ⅰ Ⅱ ΔP/m 2.230 13.459 RMS/m 4.428 14.798 下载:
导出CSV
表 11着陆器位置误差和中继卫星的轨道误差RMS
Table 11Lander position error values and RMS of relay-satellite orbit error
实验方案 Ⅰ Ⅱ Ⅲ 正常观测 ΔP/m 2.230 2.748 5.337 RMS/m 4.428 11.384 16.011 四程交替观测 ΔP/m 1.257 2.596 2.660 RMS/m 2.459 19.558 14.855 全交替观测 ΔP/m 9.559 68.176 92.783 RMS/m 37.702 390.71 76.5158 下载:
导出CSV
表 12不同观测弧长下着陆器位置误差
Table 12Lander position error values for different observation arc lengths
观测弧长 1 d 7 d 15 d ΔP/m 2.748 0.139 0.338 下载:
导出CSV
-
[1] 鄢建国,李斐,平劲松,等. 月球重力场模型发展现状及展望[J]. 测绘信息与工程,2010,35(1):44-46.YAN J G,LI F,PING J S,et al. The development situation and prospect of lunar gravity field model[J]. Journal of Geomatics,2010,35(1):44-46. [2] 李春来,刘建军,左维,等. 中国月球探测进展(2011—2020年)[J]. 空间科学学报,2021,41(1):68-75.doi:10.11728/cjss2021.01.068LI C L,LIU J J,ZUO W,et al. Progress of China’s lunar exploration (2011—2020)[J]. Chin. J. Space Sci.,2021,41(1):68-75.doi:10.11728/cjss2021.01.068 [3] 裴照宇,王琼,田耀四. 嫦娥工程技术发展路线[J]. 深空探测学报(中英文),2015(2):99-110.PEI Z Y,WANG Q,TIAN Y S. Technology roadmap for Chang’E program[J]. Journal of Deep Space Exploration,2015(2):99-110. [4] 裴照宇,刘继忠,王倩,等. 月球探测进展与国际月球科研站[J]. 科学通报,2020,65(24):2577-2586.doi:10.1360/TB-2020-0582PEI Z Y,LIU J Z,WANG Q,et al. Overview of lunar exploration and international Lunar research station[J]. Chin Sci Bull,2020,65(24):2577-2586.doi:10.1360/TB-2020-0582 [5] 曹建峰,刘磊,刘也,等. 基于中继测量的环月探测器定轨能力分析[J]. 飞行器测控学报,2017,36(2):112-117.CAO J F,LIU L,LIU Y,et al. A simulation study of orbit determination for lunar probe via tracking and data relay satellite[J]. Journal of Spacecraft TT&C Technology,2017,36(2):112-117. [6] SAITO Y,YOKOTA S,ASAMURA K,et al. In-flight performance and initial results of plasma energy angle and composition experiment (PACE) on SELENE (Kaguya)[J]. Space Science Reviews,2010,154(1):265-303. [7] GOOSSENS S,MATSUMOTO K,ROWLANDS D D,et al. Orbit determination of the SELENE satellites using multi-satellite data types and evaluation of SELENE gravity field models[J]. Journal of Geodesy,2011,85(8):487-504.doi:10.1007/s00190-011-0446-2 [8] KATO M,SASAKI S,TANAKA K,et al. The Japanese lunar mission SELENE:Science goals and present status[J]. Advances in Space Research,2008,42(2):294-300.doi:10.1016/j.asr.2007.03.049 [9] KATO M,SASAKI S,TAKIZAWA Y. The Kaguya mission overview[J]. Space Science Reviews,2010,154(1):3-19. [10] 平劲松,河野裕介,河野宣之,等. 日本SELENE月球探测计划和卫星间多普勒跟踪的数学模型[J]. 天文学进展,2001(3):354-364.PING J S,KONO Y,KAWANO N,et al. SELENE mission:mathematical model for SST Doppler measurements[J]. Progress in Astronomy,2001(3):354-364. [11] NAMIKI N,IWATA T,MATSUMOTO K,et al. Farside gravity field of the moon from four-way Doppler measurements of SELENE (Kaguya)[J]. Science,2009,323(5916):900-905.doi:10.1126/science.1168029 [12] DUAN J F,WANG Z K. Orbit determination of CE-4’s relay satellite in Earth-Moon L2 libration point orbit[J]. Advances in Space Research,2019,64(11):2345-2355.doi:10.1016/j.asr.2019.08.012 [13] LI C,WANG C,WEI Y,et al. China’s present and future lunar exploration program[J]. Science,2019,365(6450):238-239.doi:10.1126/science.aax9908 [14] BHASIN K B, HACKENBERG A W, SKYWALK R A, et al. Lunar relay satellite network for space exploration: architecture, technologies and challenges [C]//24th AIAA International Communications Satellite Systems Conference. San Diego, USA: AIAA, 2006. [15] 刘庆会. 月球背面探测器跟踪的4程多普勒技术[J]. 中国科学: 物理学 力学 天文学, 2016, 46(3): 105-112.LIU Q H. 4-way Doppler technology for tracking satellite on lunar farside[J]. SCIENCE CHINA Physics, Mechanics & Astronomy, 2016, 46(3)105-112. [16] QIN S,HUANG Y,LI P,et al. Orbit and tracking data evaluation of Chang’E-4 relay satellite[J]. Advances in Space Research,2019,64(4):836-846.doi:10.1016/j.asr.2019.05.028 [17] 熊亮,张磊. 月球南极中继通信轨道仿真分析[J]. 深空探测学报(中英文),2020,7(3):264-270.doi:10.15982/j.issn.2095-7777.2020.20191108006XIONG L,ZHANG L. The simulation analysis of lunar Antarctic relay communication orbit[J]. Journal of Deep Space Exploration,2020,7(3):264-270.doi:10.15982/j.issn.2095-7777.2020.20191108006 [18] 黄勇, 昌胜骐, 李培佳, 等. “嫦娥三号”月球探测器的轨道确定和月面定位[J]. 科学通报, 2014, 59: 2268-2277.HUANG Y, CHANG S Q, LI P J, et al. Orbit determination of Chang’E-3 and positioning of the lander and the rover[J]. Chin Sci Bull, 2014, 59: 3858-3867. [19] 曹建峰,张宇,陈略,等. 利用多普勒测量确定嫦娥四号着陆器精密定轨[J]. 宇航学报,2020,41(7):920-925.doi:10.3873/j.issn.1000-1328.2020.07.010CAO J F,ZHANG Y,CHEN L,et al. Orbit determination of Chang’E-4 lander using doppler measurement[J]. Journal of Astronautics,2020,41(7):920-925.doi:10.3873/j.issn.1000-1328.2020.07.010 [20] 王镓, 吴伟仁, 李剑, 等. 基于视觉的嫦娥四号探测器着陆点定位[J]. 中国科学: 技术科学, 2020, 50: 41-53.WANG J, WU W R, LI J, et al. Vision based Chang’E-4 landing point localization (in Chinese)[J]. Scientia Sinica Technologica, 2020, 50: 41-53. [21] ZHENG W,HSU H T,ZHONG M,et al. An analysis on requirements of orbital parameters in satellite-to-satellite tracking mode[J]. Chinese Astronomy & Astrophysics,2010,34(4):413-423. [22] FLOBERGHAGEN R,NOOMEN R,VISSER P,et al. Global lunar gravity recovery from satellite-to-satellite tracking[J]. Planetary & Space Science,1996,44(10):1081-1097. [23] 叶茂. 月球探测器精密定轨软件研制与四程中继跟踪测量模式研究[J]. 测绘学报,2016,45(9):1132.doi:10.11947/j.AGCS.2016.20160339YE M. Development of lunar spacecraft precision orbit determination software system and research on a four-way relay tracking measurement mode[J]. Acta Geodaetica et Cartographica Sinica,2016,45(9):1132.doi:10.11947/j.AGCS.2016.20160339 [24] LEMOINE F G,GOOSSENS S,SABAKA T J,et al. High-degree gravity models from GRAIL primary mission data[J]. Journal of Geophysical Research:Planets,2013,118(8):1676-1698. -

 点击查看大图
点击查看大图

计量
- 文章访问数:51
- HTML全文浏览量:18
- PDF下载量:15
- 被引次数:0






























