

 下载:
下载:



-
20世纪60年代以来,全球开展了数百次空间科学与探索任务,其中深空探测任务近260次。月球作为距离地球最近的天体,一直以来被视为迈向深空的重要门户。开展月球探测,对于揭示太阳系起源及演化具有重要意义,月球丰富的矿产资源将对人类社会可持续发展具有重要影响。
近年来,是否存在水冰是月球探测的热点,多种任务的探测数据表明,月球南极尤其是永久阴影区可能存在水冰[1-4],成为国际上月球探测最为关注的内容。中国月球探测工程在2020年完成“三步走”后,将由发展月球探测能力向月球科学深化研究与资源综合开发利用转变,持续深化开展月球探测[5]。
月球南极地区环境复杂,太阳高度角低、地形崎岖、光影变化十分剧烈,不同着陆区的地形和地貌、光照条件等方面存在显著差异,对探测器安全着陆、月面安全工作有较大影响。因此,对探测器着陆区的选址提出了更高要求。
本文将基于月球南极地形和光照特点,从工程实现角度通过分析探测器着陆区的选址约束,给出着陆区选址方法,并通过已有任务数据分析给出可能的选址结果。
-
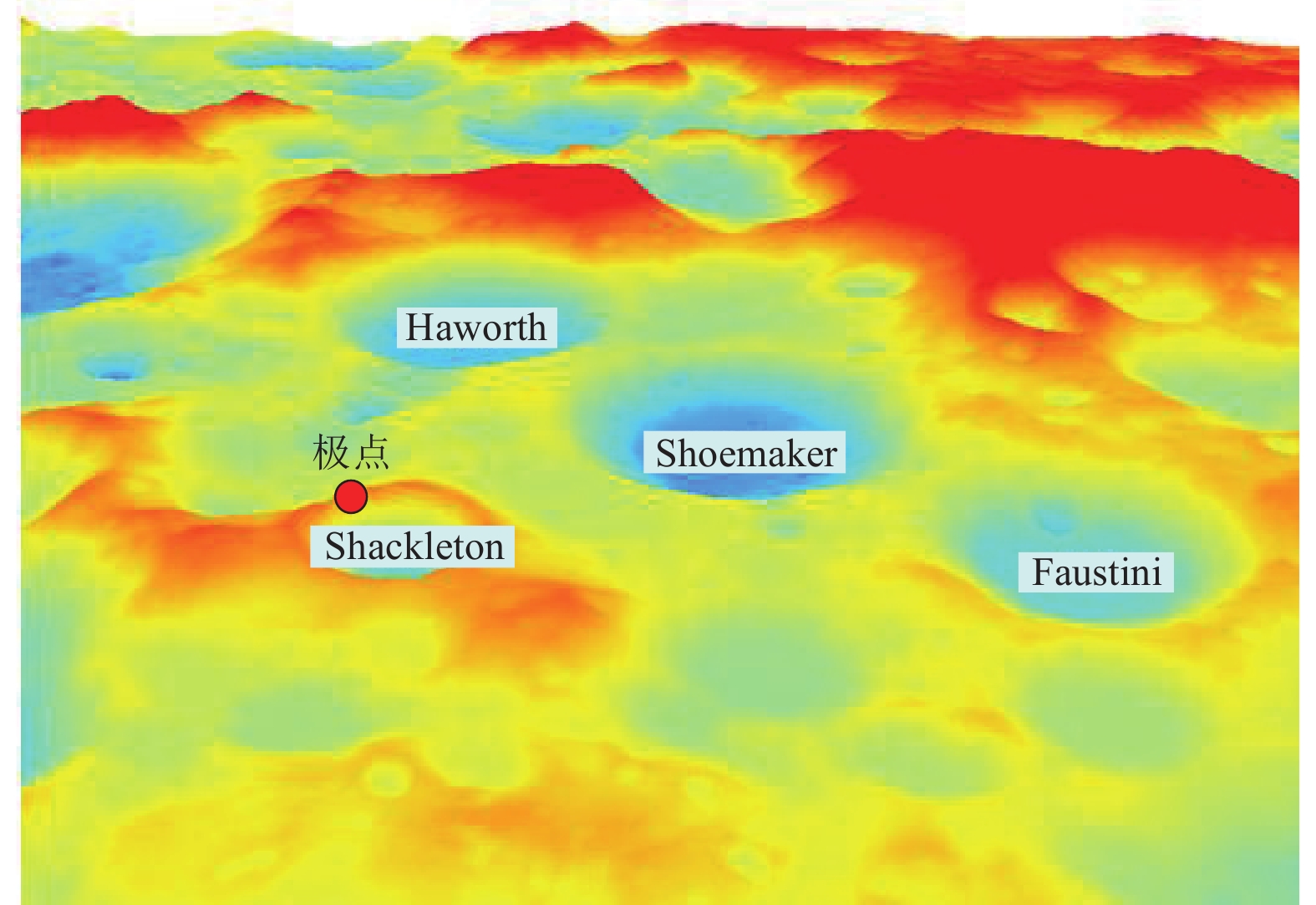
月球南极地区分布着众多的高山和撞击坑,其地形如图1所示,由图1可知地形崎岖,可用于着陆的平坦区域相对较少[6-7]。

图 1月球南极地形示意图
Figure 1.Illustration of lunar south pole
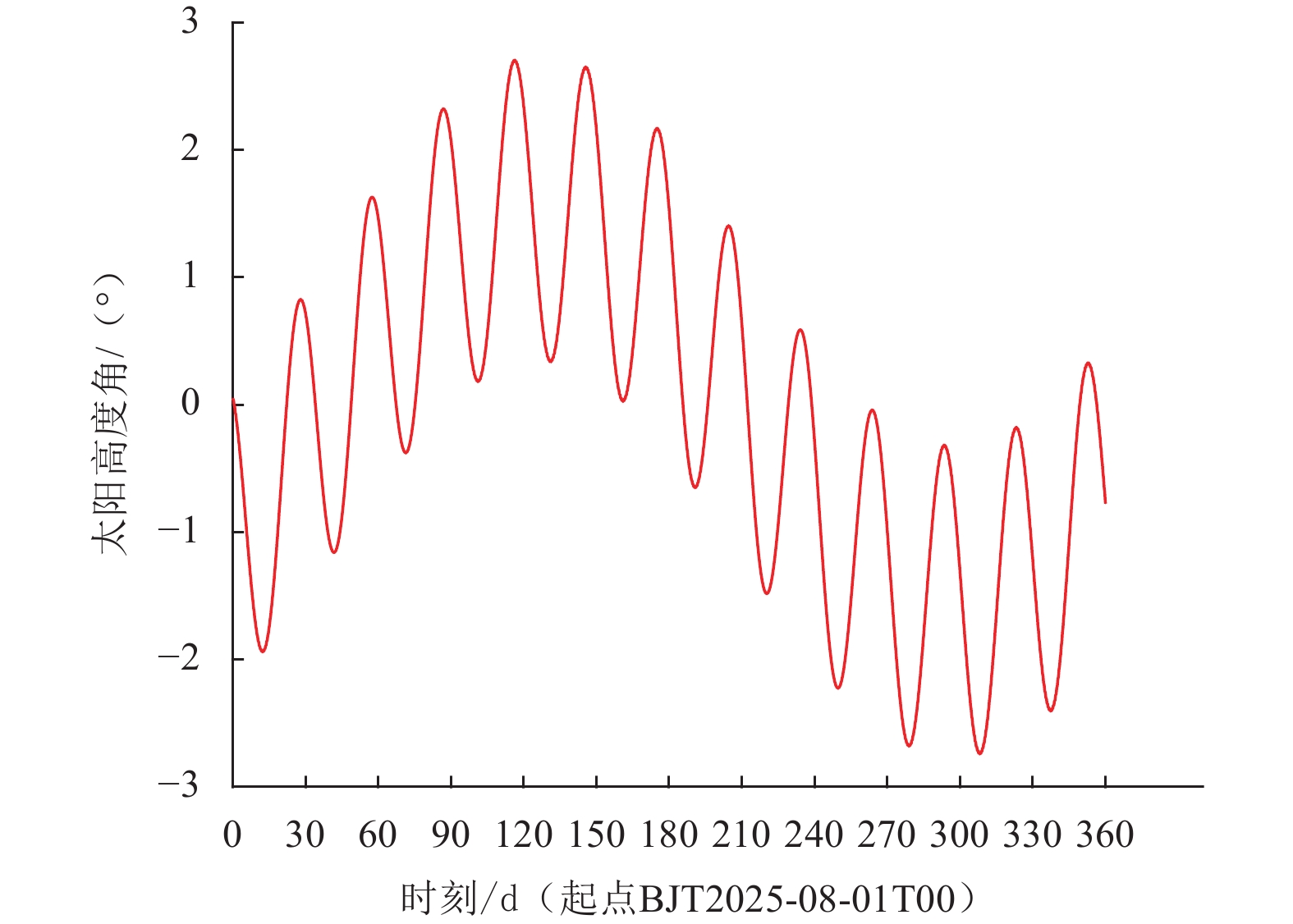
月球南极太阳高度角极低,极点的太阳高度角在±1.54º之间变化,并随着纬度的变化而略有变化。以Shackleton撞击坑外月面为例,在1 a时间内太阳高度角随时间变化的曲线如图2所示,可以看出约有半年时间太阳高度角大于0°,即月球南极极昼,约有半年时间太阳高度角小于0°,即月球南极极夜,且在极昼期间,太阳高度角最大值约2.8°,太阳高度角以太阳月(约29.5 d,对应太阳方位角变化360°)为单位周期性变化,相邻月份的太阳高度角略有不同[8-9]。

图 2Shackleton撞击坑外月面的太阳高度角随时间变化曲线(起始时间为2025-08-01,分析时长1 a)
Figure 2.Solar altitude variation of lunar surface outside the Shackleton crater (one year since 2025-08-01)
崎岖的地形加上极低的太阳高度角,尤其容易产生地形阴影,除极个别相对平坦的高地外,几乎不存在成片的连续光照区[10],这给探测器着陆区的选址工作带来了极大挑战。
-
为保证探测器能够安全着陆后正常开展探测,考虑探测器着陆能力、着陆后初始化及开展工作的光照时段、测控弧段需求,同时兼顾能源代价。本节分别从安全着陆、月面初始化、长期工作、代价等4个约束开展分析。
-
1)坡度
着陆区内坡度条件应足够平缓以保证探测器可通过避障安全着陆于月面。根据着陆器的设计状态,要求着陆区坡度小于某一阈值
$ {M}_{\mathrm{s}\mathrm{l}\mathrm{o}\mathrm{p}\mathrm{e}} $ 〔非全区域,考虑制导、导航 与 控制(Guidance navigation and control ,GNC)在轨避障能力允许部分区域超过该坡度阈值$ {M}_{\mathrm{s}\mathrm{l}\mathrm{o}\mathrm{p}\mathrm{e}} $ 〕。为提高计算精度,坡度计算采用3阶反距离平方权,为
$$ {\alpha }_{\mathrm{s}\mathrm{l}\mathrm{o}\mathrm{p}\mathrm{e}}=\mathrm{arctan}\sqrt{{f}_{x}^{2}+{f}_{y}^{2}} $$ (1) $$ {f}_{x}=\frac{{z}_{i+1,j+1}-{z}_{i+1,j-1}+2\left({z}_{i,j+1}-{z}_{i,j-1}\right)+{z}_{i-1,j+1}-{z}_{i-1,j-1}}{8g} $$ (2) $$ {f}_{y}=\frac{{z}_{i+1,j-1}-{z}_{i-1,j-1}+2\left({z}_{i+1,j+1}-{z}_{i-1,j}\right)+{z}_{i+1,j+1}-{z}_{i-1,j+1}}{8g} $$ (3) 其中:
$ {z}_{i,j} $ 为当前被分析点高程值;$ {z}_{i\pm 1,j\pm 1} $ 为被分析点周围3 × 3网格点的剩余8个点高程值;$ g $ 为网格粒度。2)着陆精度
着陆区大小应保证在GNC现有着陆精度下,探测器可落在着陆区范围内。经过选址和GNC设计的迭代并综合考虑各项资源代价,假定GNC可实现着陆精度
$ A $ m。为匹配敏感器视场、地图画幅,引入方形半径的概念①,要求着陆区范围不小于$2A\mathrm\;{m}\times 2A\mathrm\;{m}$ ,即$$ {d}_{\mathrm{l}\mathrm{a}\mathrm{n}\mathrm{d}\mathrm{i}\mathrm{n}\mathrm{g}\mathrm{s}\mathrm{i}\mathrm{t}\mathrm{e}}\geqslant 2A $$ (4) 3)规避小型撞击坑和石块
目前已获取的月球南极地区熟悉高程图(Digital Elevation Mode,DEM)最高分辨率5 m[11],5 m以上的障碍通过坡度来判别,5 m以下的障碍无法提前识别,由GNC在轨自主判断,该条件不对选址提出约束。需要说明的是,若后续获得了更高分辨率的光学图像,可对预选结果提前确认,以剔除危险区域。
-
着陆后整个着陆区域(因为探测器可能着陆到着陆区的任意位置,所以要求整个区域)连续光照时间应满足一定的时长阈值,以保证在阴影期来临之前完成探测器初始化任务,其项目较多且过程复杂。根据任务飞行程序设计结果,给定着陆后初始化任务耗时天数阈值
$ D $ ,即要求整个着陆区在着陆后有连续大于该阈值天数$ D $ 的光照,即$$ {T}_{\mathrm{l}\mathrm{a}\mathrm{n}\mathrm{d}\mathrm{i}\mathrm{n}\mathrm{g}\mathrm{s}\mathrm{i}\mathrm{t}\mathrm{e}}\geqslant D $$ (5) -
1)光照条件
月球极区存在大于1个月的长期光照区,这一点和中低纬度地区存在典型差别,长期光照区作为一种稀缺环境资源应充分寻找并加以利用,因此期望着陆区临近区域(几百m范围内)有长时间连续光照的位置,以保证探测器在着陆后移动到长期光照区实现长时间工作。长时间光照的宏观要求是在1 a中太阳高度角最高的3个月一直有光照,结合仿真结果筛选合适的时长天数
$ {D}_{\mathrm{c}\mathrm{o}\mathrm{n}} $ ,即要求着陆区临近区域存在一年中有连续$ {D}_{\mathrm{c}\mathrm{o}\mathrm{n}} $ 天及以上光照的位置,即$$ {T}_{\mathrm{l}\mathrm{a}\mathrm{n}\mathrm{d}\mathrm{i}\mathrm{n}\mathrm{g}\mathrm{s}\mathrm{i}\mathrm{t}\mathrm{e}-\mathrm{c}\mathrm{o}\mathrm{n}}\geqslant {D}_{\mathrm{c}\mathrm{o}\mathrm{n}} $$ (6) 2)测控条件
单站对中继星可见且中继星可见月面的情况下,南极不同地区/时段的测控时长相当;针对特定时段(无论是月面初始化还是月面长期工作阶段)的测控需求(含关键时段的国内双站共视),通过中继星轨道设计可匹配其需求,所以该条件并不对选址提出约束。
3)探测器移动
考虑探测器坡度适应能力,在满足安全着陆坡度条件下,可以满足探测器行走需求,即使遇到无法通过的石块、坑等障碍,也可通过移动规划/避障进行应对,该条件不对选址构成约束。
-
着陆区的光照属性决定了探测器不仅要定点着陆,还要定时着陆;若在预定的着陆时刻探测器异常无法着陆,需推迟着陆,变轨代价也应一并考虑;此外,尽量选择距离含水阴影坑距离较近的区域,节省推进剂的消耗。
通过上述分析,探测器着陆区选址约束为
1)着陆区坡度小于安全阈值
$ {M}_{\mathrm{s}\mathrm{l}\mathrm{o}\mathrm{p}\mathrm{e}} $ ;2)整个着陆区在着陆后有连续光照天数
$ D $ ;3)着陆区临近区域存在一年中有连续
$ {D}_{\mathrm{c}\mathrm{o}\mathrm{n}} $ 天光照的位置;4)着陆区范围不小于
$2A\;\mathrm{m}\times 2A\;\mathrm{m}$ 。月球南极地形崎岖,坡度阈值越小,连续光照时间要求越长,能够筛选的安全区域越小。因此,着陆区越大,前3项条件越难满足,尤其是第2项,因为月球极区极低的太阳高度角,小的地形起伏也容易造成地形阴影,所以很难保证整个区域都有光照。第4项条件即为着陆区大小的约束,和前3项条件是“此消彼长”的关系,结合在一起比较苛刻,能全部满足这些条件的区域相当有限。
-
针对月球南极地区(南纬85°以上区域)开展着陆区选址工作,需要从工程和科学并行开展、交互择优。
1)工程上约束严苛的是探测器着陆区,主要考虑坡度条件和复杂的光照条件;科学上重点关注阴影坑的选择,主要考虑水冰分布情况。为同时满足工程和科学的需求,避免遗漏,先并行独立开展探测器着陆区的选择以及阴影坑的选择。
2)按照探测器探测距离约束,对探测器着陆区选址结果和阴影坑匹配筛选,从工程约束角度进一步缩小阴影坑的选择范围。
-
对于着陆区选择,最主要的约束是光照和坡度。光照分析算法复杂,月球南极区域较大,计算量也巨大,为提高筛选效率,本文提出基于先初筛后精筛的思路,逐步筛除不符合的区域,最终确认预选着陆区。
1)初筛
针对南纬85°以上区域,采用较低分辨率的DEM和光照率图初筛,获得同时满足坡度安全着陆、长期探测条件(存在连续光照)的点集,并初步确定目标区域(数百m量级),约定后续精筛的搜索范围。坡度计算使用美国月球轨道勘测器(Lunar Reconnaissance Orbiter,LRO)官网发布的南纬85°~90°区域10 m分辨率DEM数据,光照使用LRO南纬80°~90°区域60 m分辨率DEM数据,光照率采用美国国家航空航天局(National Aeronautics and Space Administration,NASA)发布的平均光照率图(数据时间为2009-07-13—2013-07-18的统计结果)。
2)精筛
使用可获得的最高分辨率DEM(坡度计算使用LRO南纬87.5°~90°区域5 m分辨率DEM和南纬85°~87.5°区域10 m分辨率DEM;光照计算还额外需要LRO南纬80°~85°区域20 m分辨率DEM),对初筛框选的每个区域细致筛选,筛选着陆区的条件:①坡度满足安全阈值
$ {M}_{\mathrm{s}\mathrm{l}\mathrm{o}\mathrm{p}\mathrm{e}} $ (以保证安全着陆);②区域范围大于$2A\;\mathrm{m}\times 2A\;\mathrm{m}$ (以满足$ A $ m着陆精度);③全区域有$ D $ 天以上连续光照时间(以完成月面初始化工作);④着陆区临近区域存在$ {D}_{\mathrm{c}\mathrm{o}\mathrm{n}} $ 天及以上连续光照位置(以有利于长期探测)。选址详细流程如图3所示,在初筛/精筛操作中,均是按照先找长期探测区(主要满足长期光照条件)、后找安全着陆区(满足安全着陆条件)。
图 3着陆区选址流程图
Figure 3.Flowchart of landing site selection
长期探测区初筛:①全年高光照率点筛选,筛选出满足50%以上全年光照率的区域点集;②
$ {D}_{\mathrm{c}\mathrm{o}\mathrm{n}} $ 及以上连续光照点初筛,在满足50%以上全年光照率的区域点集基础上,筛选出满足$ {D}_{\mathrm{c}\mathrm{o}\mathrm{n}} $ 及以上连续光照的区域点集;③行走安全性初筛,在连续光照点的基础上,筛选出满足探测器行走安全性的区域点集。安全着陆区初筛:①筛选出坡度满足着陆安全性的区域点集,通过判别和安全着陆区的距离筛选长期探测区;②长期探测区“膨胀”(半径Rm):对于长期探测区的点集,以栅格点为中心外扩Rm进行“膨胀”,并对地图上的膨胀区域标记;③安全着陆区对长期探测膨胀区“腐蚀”(2图相乘):将地图上的安全着陆区标记,然后和第1步的膨胀区地图进行矩阵相乘;④保留“腐蚀”成功的长期探测区:地图矩阵相乘后,对于交集区域,判断其属于哪个长期探测区,然后输出对应的长期探测区点集;⑤对长期探测区和安全着陆区取交集,采用长期探测区“膨胀”和安全着陆区“腐蚀”的方法,筛选出二者相距不超过Rm的点集;⑥划分目标大区域,针对第4步的点集,划分几个目标大区域;⑦框选目标中区域,在第5步的目标大区域内框选多个目标中区域(使用正方形框住局部的点集簇,并外扩2Rm),作为后续精筛的输入。
长期探测区的精筛,主要是进行
$ {D}_{\mathrm{c}\mathrm{o}\mathrm{n}} $ 天及以上连续光照点的精筛,即对每个目标中区域的长期光照特征复核,若存在$ {D}_{\mathrm{c}\mathrm{o}\mathrm{n}} $ 天及以上长期光照位置,则继续下一步,否则筛除该目标中区域。安全着陆区及初始化条件精筛,针对每个中区域,由大到小设置筛选方形半径(上限为目标中区域,下限为着陆精度Am),针对每个筛选方形半径组成的小区域,安全着陆区精筛,判断筛选小区域是否满足安全着陆条件,若满足则定义该小区域为安全着陆区,继续下一步,否则缩小筛选半径重复本步骤,直至到达筛选半径下限筛除该目标中区域。D天及以上全区域连续光照精筛,判断筛选小区域的全区域是否存在D天及以上连续光照,若存在则定义该小区域为可初始化小区域,进行下一步,否则缩小筛选半径返回,直至到达筛选半径下限筛除该目标中区域。将该中区域中面积最大且全区域连续光照时间最长的一个可初始化小区域作为待选着陆区(同时给出待选着陆区到长期光照区的距离,由于整个中区域在数百m量级,此处只呈现出最终距离,不将相距Rm作为筛选条件)。
-
为获得水冰存在的直接证据,首先要筛选可能有水存在的永久阴影坑。水冰遥感探测载荷主要有雷达、中子探测仪和光谱仪3类。
-
雷达水冰探测数据最主要的问题是无法排除地形粗糙度的影响。月球表面典型的圆极化比(Circular Polarization Ratio,CPR)在0.3 ~ 0.5,水冰的CPR在2左右,粗糙或有石块的表面CPR最高可达2 ~ 4[12]。目前雷达探测到的CPR异常区域的CPR均值<1.5,因此是地形粗糙度引起还是水冰引起的CPR异常。当雷达探测到目标区域CPR异常(增大)时,有可能是目标区域含水,也有可能是目标区域的粗糙度导致。
-
月表几乎没有大气,直接暴露在宇宙线当中。宇宙线中的高能粒子轰击到月球表面,与月表物质发生反应,将中子从月表物质中剥离出来。
根据月表中子的能量分布特性,将中子分成3个能段,快中子能量700 keV~5 MeV、超热中子能量0.4 eV~700 keV,热中子能量0~0.4 eV。H原子质量与中子接近,因此其与中子的碰撞截面更大,如果月面某区域含H,则在这个区域运动的超热中子在从月表逃逸进入宇宙之前都会被快速“冷却”,速度明显变慢,能量锐减,成为热中子(能量 < 0.3 eV)。当中子探测仪经过氢含量高的地区上空时,中子探测器将检测到超热中子数的减少,目标区域的氢含量就可通过中子计数率的相对高低来反映。
中子探测仪的原理决定了只能判定目标区域含H,且月面发射中子内超热中子与H的作用截面最高,因此超热中子对H最敏感,而超热中子的出射深度在1 m以内,中子探测仪探测到H的区域,其H原子分布在深度1 m以内的区域。
-
光谱探测水冰是通过探测目标区域的光谱反射特性和吸收特性来判断是否有水冰。其中反射特性主要是利用含水后某些频段反射率增强,吸收特性则是通过分析光谱中是否在H2O的特征谱段有吸收峰,光谱探测载荷有LR的LAMP(Lyman-Alpha Mapping Project)、Chandrayaan-1的M3(Moon Mineralogy Mapper)及月球坑观测和传感卫星(Lunar Crater Observation and Sensing Satellite,LCROSS)的近红外光谱仪和紫外–可见光光谱仪。
LAMP是基于特定谱段反射率较高来推断水冰的存在,这种方法的局限性在于不唯一指向水冰,OH也可表现出同样的趋势;另外是只代表表层微米量级范围内可能有水。
M3数据首先综合了1.3、1.5、2.0 μm的吸收特性,同时考虑了温度低于110 K、LOLA反射率较高和LAMP的off/on比值较高等因素,利用了多种可能有水的指征;但光谱探测数据只代表表层微米量级范围内可能有水,且由于载荷设计限制,不能区分结构水和水冰;另外,虽然原始数据覆盖了南极永久阴影坑,但是利用杂散光信号,对于信噪比比较差的区域,可能存在假水冰信号或者水冰赋存区域漏检的可能性。LCROSS撞击数据的最大局限性在于只代表撞击位置可能有水。根据以往月球探测器的科学探测成果,对雷达、中子和光谱等多源数据融合,利用取交集的办法筛选出更可能有水的永久阴影区。
-
通过坑外、坑内选址后,可得出若干组匹配的探测器坑内着陆区,需要择优确定最终的选址结果。
1)初选
考虑科学和工程需求,梳理优选时的考虑因素并制定优选规则,对探测器着陆区的匹配结果排序,取排名前列的作为初选结果,期望能够获得若干组主备着陆区。筛选条件严苛的探测器着陆区是考虑重点。
2)定时定点着陆代价分析
初选完成后,仅确定了空间属性,对于组合体坑外着陆来说,因光照约束,还需考虑时间属性,即“定时定点”着陆的概念,所以需进一步确定着陆时段。针对初选结果以及对应的着陆/遥感时段,分析到达每个着陆区的推进资源代价,对比推进剂的消耗情况,评估每个着陆区的可达性以及它们之间相互切换的可行性。
3)综合择优
综合考虑工程可实现、科学价值高、发展可持续等方面因素,多方案进行比对,按照光照区面积、推进剂消耗、可达阴影坑数量及距离等因素,给定权重进行量化评估,确定最终探测器着陆区。
-
基于上述原则和方法,采用LRO官网发布的DEM数据、NASA发布的平均光照率图、科学探测数据开展着陆区筛选工作。对于南纬85°以上区域,筛选结果逐步收敛。
1)坑外安全着陆点600多万个,如图4所示,本节以坡度小于8°为例筛选。

图 4坑外安全着陆点(浅黄色标记)
Figure 4.Illustration of lunar south pole
需要说明的是,对于南纬87.5°以上区域,采用10 m分辨率的DEM得到的安全着陆区比利用5 m分辨率获得的更多(坡度基线越长,计算的坡度越小),初筛阶段为保证不遗漏符合要求的点,85°以上均使用10 m分辨率DEM,安全着陆区共6196407个,如表1和图4所示。
表 1南纬85°以上区域坡度安全性筛选情况
Table 1.Filter results of safe slope over lunar 85° S
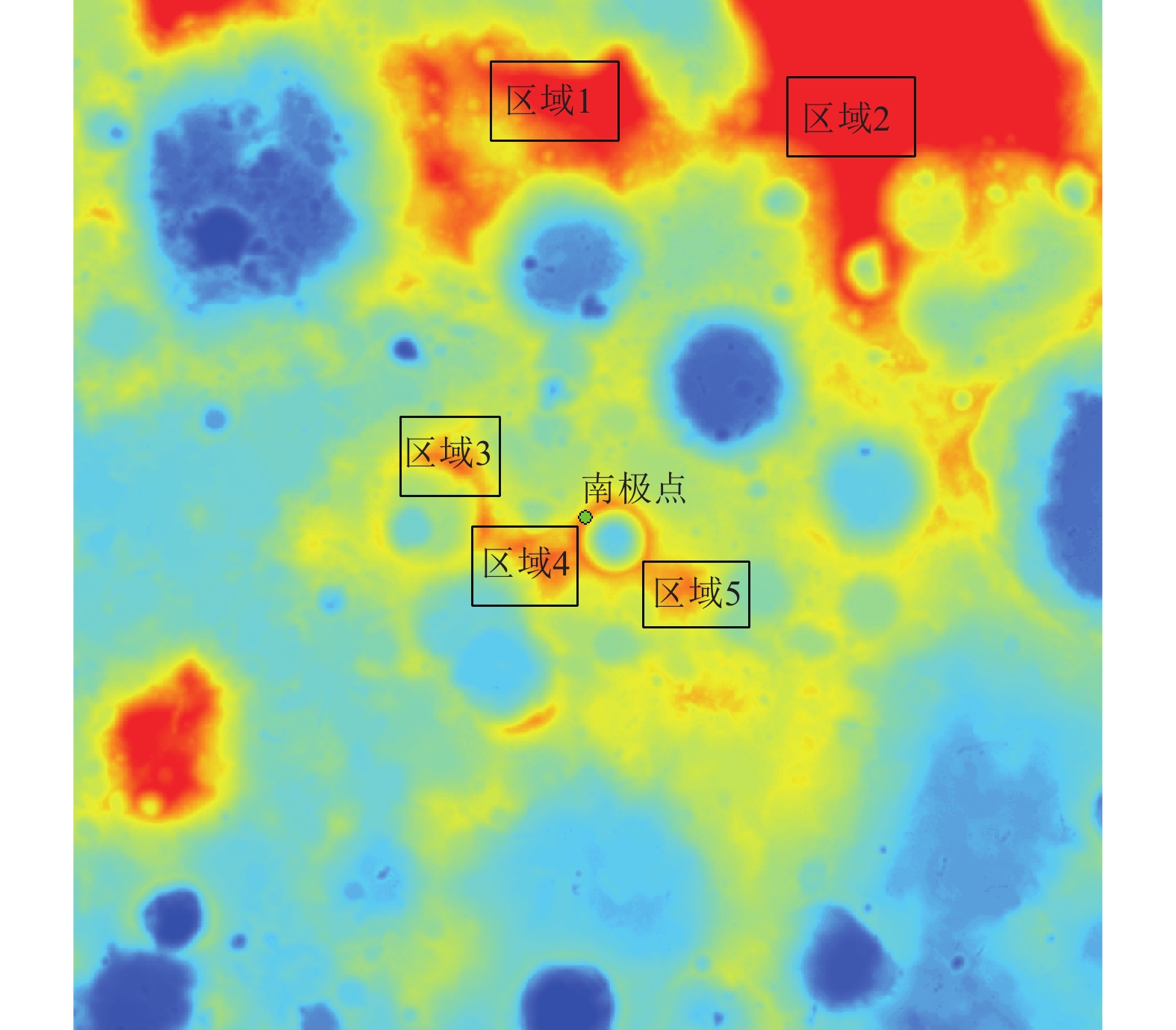
参数 值 筛选区域 南极85°以上 区域x值范围/m [–151 650,151 650] 区域y值范围/m [–151 650,151 650] 安全区域地图分辨率/m 10 安全着陆区数量 6 196 407 2)坑外既满足安全着陆又满足长期光照的位置,主要集中在5个区域,如图5和表2所示。

图 5满足安全着陆及长期光照区域
Figure 5.Continuous lighting and safe landing sites
表 2满足安全着陆及长期光照区域列表
Table 2.List of continuous lighting and safe landing sites
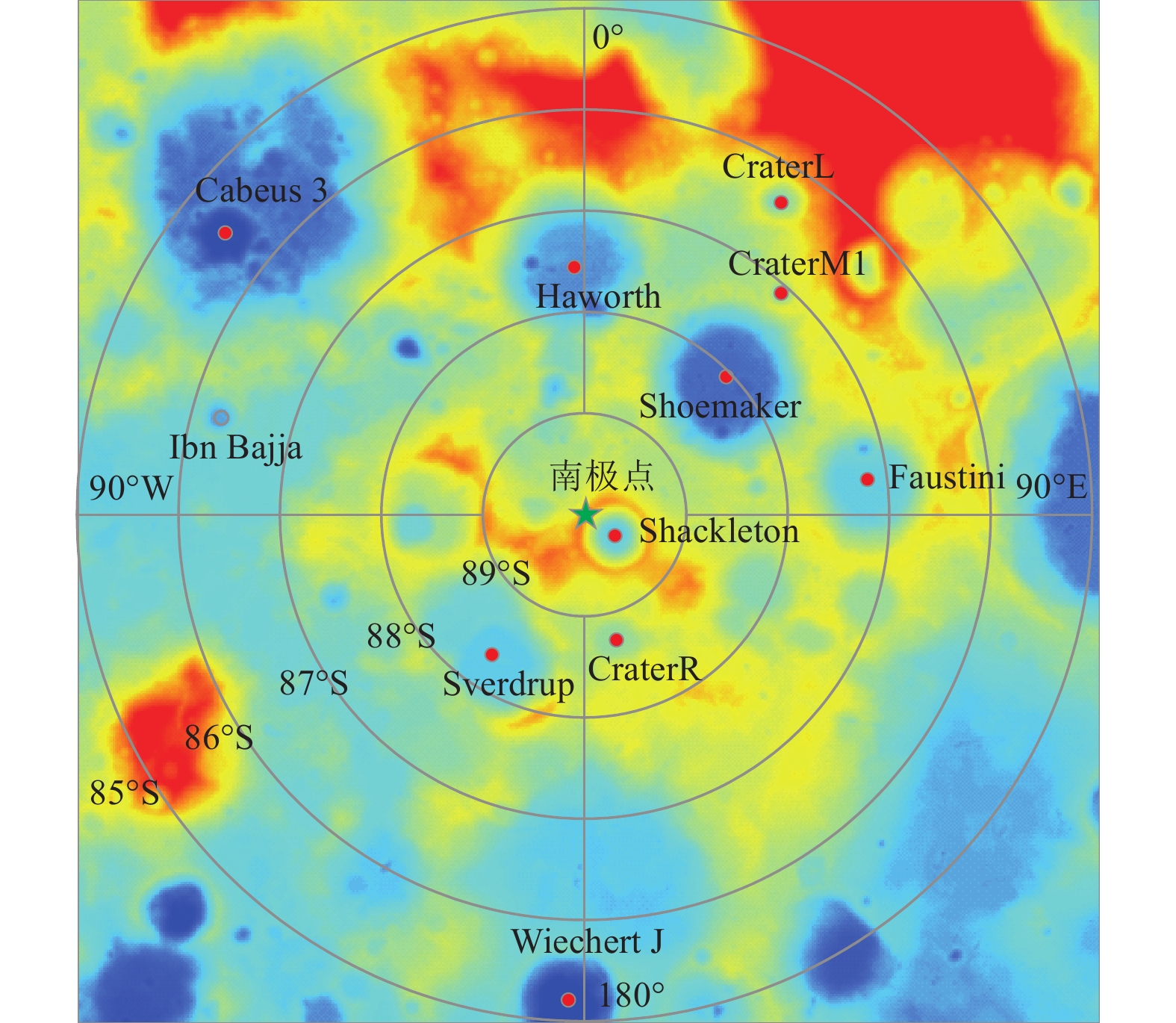
序号 位置 区域1 Haworth 撞击坑北部 区域2 Shoemaker 撞击坑东北部 区域3 Shackleton 撞击坑西北部 区域4 Shackleton 撞击坑西部 区域5 Shackleton 撞击坑东南部 3)在着陆区筛选的同时,结合地形、温度、中子、光谱和雷达等多源遥感数据以及坡度计算结果,筛选出12个可能有水的永久阴影坑位置,如图6和表3所示。

图 6多源数据筛选的可能含水阴影坑分布图
Figure 6.Filtering results of possible watery shadow craters by remote sensing data
表 3多源数据筛选的可能含水阴影坑分布位置
Table 3.Filtering results of possible watery shadow crater positions by remote sensing data
序号 阴影坑名称 中心纬度/(°) 中心经度/(°) 1 CraterR –88.743 169.223 2 Shackleton –89.669 129.717 3 Shoemaker –88.14 45.91 4 CraterF –87.585 –47.289 5 Faustin –87.18 84.31 6 CraterL –86.388 31.839 7 Sverdrup –88.27 –145.047 8 Haworth –87.45 –5.17 9 CraterM1 –87.128 40.73 10 Cabeus 3 –85.415 –52.159 11 Wiechert J –85.021 –177.639 12 Ibn Bajja –86.259 –75.103 经初步分析,筛选出的安全着陆区与永久阴影坑相对距离范围在数km到数10 km量级,同一着陆区存在多个可达的永久阴影坑,后续将进一步细致划分和对比择优。
随后,需结合图5的安全着陆及长期光照区以及图6的永久阴影坑筛选结果,综合考虑工程实施难度、科学目标要求等方面进行综合研判,未来需在具体工程任务中细致考虑。
-
本文在分析月球南极地形和光照特点的基础上,从工程选址角度梳理了探测器着陆影响因素,包括着陆安全、探测器着陆初始化、月面长期工作、实现代价等,进而筛选出坡度、全区域连续光照、临近区域连续光照、着陆区范围4个选址约束条件,提出了月球南极着陆区选址方法,通过先粗筛后精筛的策略,逐步筛选择优排序选定着陆区。最后通过算例给出了探测器着陆区的选址结果,初步给出了5大安全着陆区域,为月球探测任务选址工作开展提供支撑。
Landing Site Selection Method of Lunar South Pole Region
-
摘要:月球南极极区丰富的资源和光照条件,尤其是潜在的水冰,使其成为当前各国开展探测活动的一大热点。由于南极地区地形崎岖、光照变化迅速的特点,使得探测任务着陆区的选址至关重要。选址结果直接决定了探测任务的成败,也是整体方案过程中各分系统开展设计的重要依据。围绕月球南极探测着陆区选址,结合月球和太阳星历的几何关系、月球南极地形和光照特点,给出了选址的影响因素及约束,提出了从工程角度考虑选址的方法,通过不同分辨率的数据源,利用先粗筛后精筛的策略确定优选着陆区。最后,通过算例初步给出了5个区域(Haworth北部、Shoemaker东北部和Shackleton西北部、西部及东南部),可为中国未来月球探测任务设计工作提供参考。Abstract:Landing site selection is an important part of the design of an exploration mission. The correctness of site selection result directly determines whether the detector can successfully complete the mission, and also determines the important basis for the design of each sub-system in the program design process. In this paper, the site selection method of the lunar south pole exploration landing area was introduced, the topography and illumination characteristics of the lunar south pole were analyzed, the principle of site selection was formulated, the influencing factors and constraints of site selection were analyzed in detail, and introduces the engineering the site selection method using coarse-to-precise strategy, combined with the site selection results, and 5 landing sites were selected initially, which will provide reference for the design of future lunar exploration missions.
-
Key words:
- landing site/
- site selection/
- lunar exploration/
- lunar south pole
Highlights● Site selection method of the lunar south pole exploration landing area was proposed in this paper. ● Topography and illumination characteristics of the lunar south pole were illustrated. ● Principle, constraints and results of landing site selection were comprehensively performed. ①区域方形半径为 R,表示以该区域中心点为基准,向地图系+ X、– X、+ Y、– Y方向分别外扩 R,即区域大小为2 R× 2 R的正方形。 -
图 2Shackleton撞击坑外月面的太阳高度角随时间变化曲线(起始时间为2025-08-01,分析时长1 a)
Fig. 2Solar altitude variation of lunar surface outside the Shackleton crater (one year since 2025-08-01)
图 6多源数据筛选的可能含水阴影坑分布图
Fig. 6Filtering results of possible watery shadow craters by remote sensing data
表 1南纬85°以上区域坡度安全性筛选情况
Table 1Filter results of safe slope over lunar 85° S
参数 值 筛选区域 南极85°以上 区域x值范围/m [–151 650,151 650] 区域y值范围/m [–151 650,151 650] 安全区域地图分辨率/m 10 安全着陆区数量 6 196 407  下载:
导出CSV
下载:
导出CSV
表 2满足安全着陆及长期光照区域列表
Table 2List of continuous lighting and safe landing sites
序号 位置 区域1 Haworth 撞击坑北部 区域2 Shoemaker 撞击坑东北部 区域3 Shackleton 撞击坑西北部 区域4 Shackleton 撞击坑西部 区域5 Shackleton 撞击坑东南部 下载:
导出CSV
表 3多源数据筛选的可能含水阴影坑分布位置
Table 3Filtering results of possible watery shadow crater positions by remote sensing data
序号 阴影坑名称 中心纬度/(°) 中心经度/(°) 1 CraterR –88.743 169.223 2 Shackleton –89.669 129.717 3 Shoemaker –88.14 45.91 4 CraterF –87.585 –47.289 5 Faustin –87.18 84.31 6 CraterL –86.388 31.839 7 Sverdrup –88.27 –145.047 8 Haworth –87.45 –5.17 9 CraterM1 –87.128 40.73 10 Cabeus 3 –85.415 –52.159 11 Wiechert J –85.021 –177.639 12 Ibn Bajja –86.259 –75.103 下载:
导出CSV
-
[1] 杜宇,盛丽艳,张熇,等. 月球水冰赋存形态分析及原位探测展望[J]. 航天器环境工程,2019,36(6):607-614.doi:10.12126/see.2019.06.012DU Y,SHENG L Y,ZHANG H,et al. Analysis of the occurrence mode of water ice on the moon and the prospect of in-situ lunar exploration[J]. Spacecraft Environment Engineering,2019,36(6):607-614.doi:10.12126/see.2019.06.012 [2] 季节, 张伟伟, 杨旭, 等. 月球极区水冰采样探测技术综述[J]. 深空探测学报(中英文), 2022, 9(2): 101-113.JI J, ZHANG W W, YANG X, et al. Overview of water ice sampling and detection techniques in the lunar polar region[J]. Journal of Deep Space Exploration, 2022, 9(2): 101-113. [3] 徐琳, 刘建忠, 邹永廖, 等. 月球表面水冰的探测和意义[J]. 空间科学学报, 2003, 23(1): 42-49.XU L, LIU J Z, ZOU Y L, et al. Discovery of water ice on the moon surface and its significance[J]. Chinese Journal of Space Science, 2003, 23(1): 42-49. [4] 贾瑛卓,覃朗,徐琳,等. 月球水冰探测[J]. 深空探测学报(中英文),2020,7(3):290-296.JIA Y Z,QIN L,XU L,et al. Lunar water-ice exploration[J]. Journal of Deep Space Exploration,2020,7(3):290-296. [5] 裴照宇,刘继忠,王倩,等. 月球探测进展与国际月球科研站[J]. 科学通报,2020,65:2577-2586.doi:10.1360/TB-2020-0582PEI Z Y,LIU J Z,WANG Q,et al. Overview of lunar exploration and International Lunar Research Station[J]. Chinese Science Bulletin,2020,65:2577-2586.doi:10.1360/TB-2020-0582 [6] 张熇,杜宇,李飞,等. 月球南极探测着陆工程选址建议[J]. 深空探测学报(中英文),2020,7(3):232-240.ZHANG H,DU Y,LI F,et al. Proposals for lunar south polar region soft landing sites selection[J]. Journal of Deep Space Exploration,2020,7(3):232-240. [7] 肖龙,乔乐,肖智勇,等. 月球着陆探测值得关注的主要科学问题及着陆区选址建议[J]. 中国科学:物理学力学天文学,2016,46:029602.doi:10.1360/SSPMA2015-00507XIAO L,QIAO L,XIAO Z Y,et al. Major scientific objectives and candidate landing sites suggested for future lunar explorations[J]. Scientia Sinica Physica, Mechanica & Astronomica,2016,46:029602.doi:10.1360/SSPMA2015-00507 [8] 张弘,盛丽艳,马继楠,等. 月球极区着陆环境特性对比及探测建议[J]. 航天器环境工程,2019,36(6):615-621.doi:10.12126/see.2019.06.013ZHANG H,SHENG L Y,MA J N,et al. Comparison of the landing environments in lunar poles and some suggestions for probing[J]. Spacecraft Environment Engineering,2019,36(6):615-621.doi:10.12126/see.2019.06.013 [9] 李飞,张熇,吴学英,等. 月球南极着陆区关键特性分析[J]. 航天器工程,2015,24(1):103-110.doi:10.3969/j.issn.1673-8748.2015.01.017LI F,ZHANG H,WU X Y,et al. Analysis of key characteristics of lunar south pole for landing[J]. Spacecraft Engineering,2015,24(1):103-110.doi:10.3969/j.issn.1673-8748.2015.01.017 [10] 吴伟仁,于登云,王赤,等. 月球极区探测的主要科学与技术问题研究[J]. 深空探测学报(中英文),2020,7(3):223-231.WU W R,YU D Y,WANG C,et al. Research on the main scientific and technological issues on lunar polar exploration[J]. Journal of Deep Space Exploration,2020,7(3):223-231. [11] SMITH D E,ZUBER M T,NEUMANN G A,et al. Summary of the results from the lunar orbiter laser altimeter after seven years in lunar orbit[J]. Icarus,2017,283:70-91.doi:10.1016/j.icarus.2016.06.006 [12] OSTRO S J,CAMPBELL D B,SIMPSON R A,et al. Europa,Ganymede,and Callisto:new radar results from Arecibo and Goldstone[J]. Journal of Geophysical Research:Planets,1992,97(E11):18227-18244.doi:10.1029/92JE01992 -

 点击查看大图
点击查看大图
图(6)/
表 (3)
计量
- 文章访问数:98
- HTML全文浏览量:28
- PDF下载量:30
- 被引次数:0




































