

Research on Orthogonalization Method of Installation Matrix of Landing IMU for Tianwen-1
-
摘要:“天问一号”的惯性测量单元(Inertial Measurement Unit,IMU)产品是其导航系统的核心敏感器,IMU中的陀螺和加速度计在安装过程中存在安装误差以及标度因非线性等因素导致安装矩阵非正交,从而影响IMU惯导精度。针对陀螺和加速度计安装矩阵误差特性进行分析,提出安装矩阵行向量正交化算法,提升了陀螺和加计安装矩阵正交性,降低了安装误差角在正交化过程中的畸变,开展了典型工况IMU惯导标定测试,试验结果表明:安装矩阵按行向量正交化处理后IMU惯导姿态精度提升15.8%~54.7%,位置精度提升45.2%~85.7%。采用上述方法,静态导航各工况位姿性能提升百分比较为一致且与试验时间不相关,动态导航各工况位姿性能提升百分比较为一致且与旋转角度累加和不相关。Abstract:The IMU of Tianwen-1 is the core product of its navigation system; during the installation of gyro and accelerometer in IMU installation deviation and nonlinear scale factor occur, leading to the non-orthogonality of installation matrix and affecting the accuracy of IMU inertial navigation. In this paper, the orthogonality of gyro and accelerometer installation matrix was analyzed, and the orthogonalization algorithm of installation matrix for row vector was proposed, which improves the orthogonality of gyro and accelerometer installation matrix and reduces the distortion of installation error angle in the process of orthogonalization. The calibration test of IMU inertial navigation under typical working conditions was carried out. The test results show that after the installation matrix was orthogonalized according to row vector, the attitude accuracy of IMU inertial navigation was improved by 15.8%~54.7%, and the position accuracy was improved by 45.2%~85.7%. Adopting the above method, the percentage of static position and attitude performance improvement under various working conditions is consistent and not related to the test time; the percentage of dynamic position and attitude performance improvement under various working conditions is consistent and not related to the cumulative sum of rotation angle.Highlights
● The installation matrix is orthogonalized according to row vector. ● Reduce the distortion of installation error angle in the process of orthogonalization. ● The attitude accuracy can be improved by 15.8%~54.7%. ● The position accuracy can be improved by 45.2%~85.7%. -

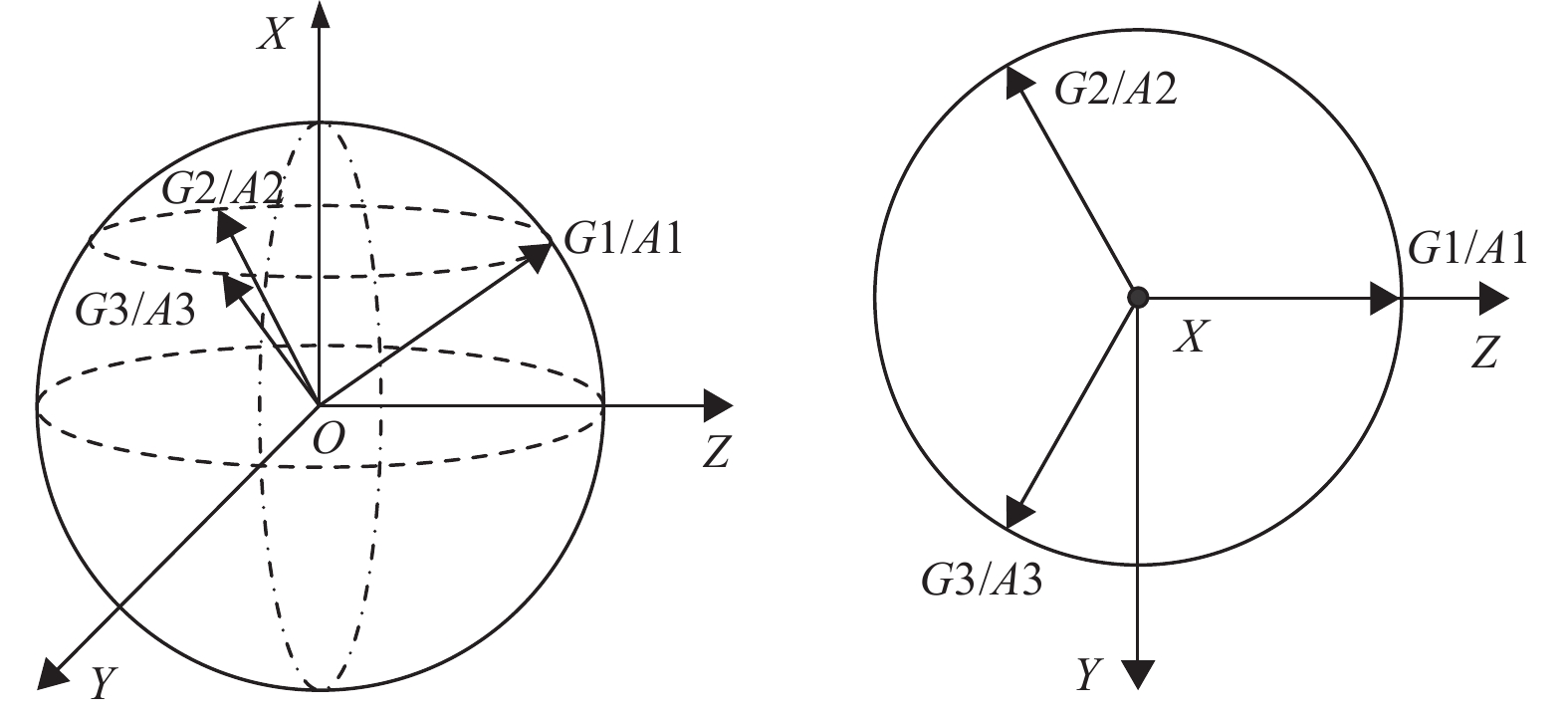
图 13S构型IMU各陀螺和加计空间布局设计图
Fig. 1Spatial layout of each gyro and accelerometer of IMU in 3S configuration

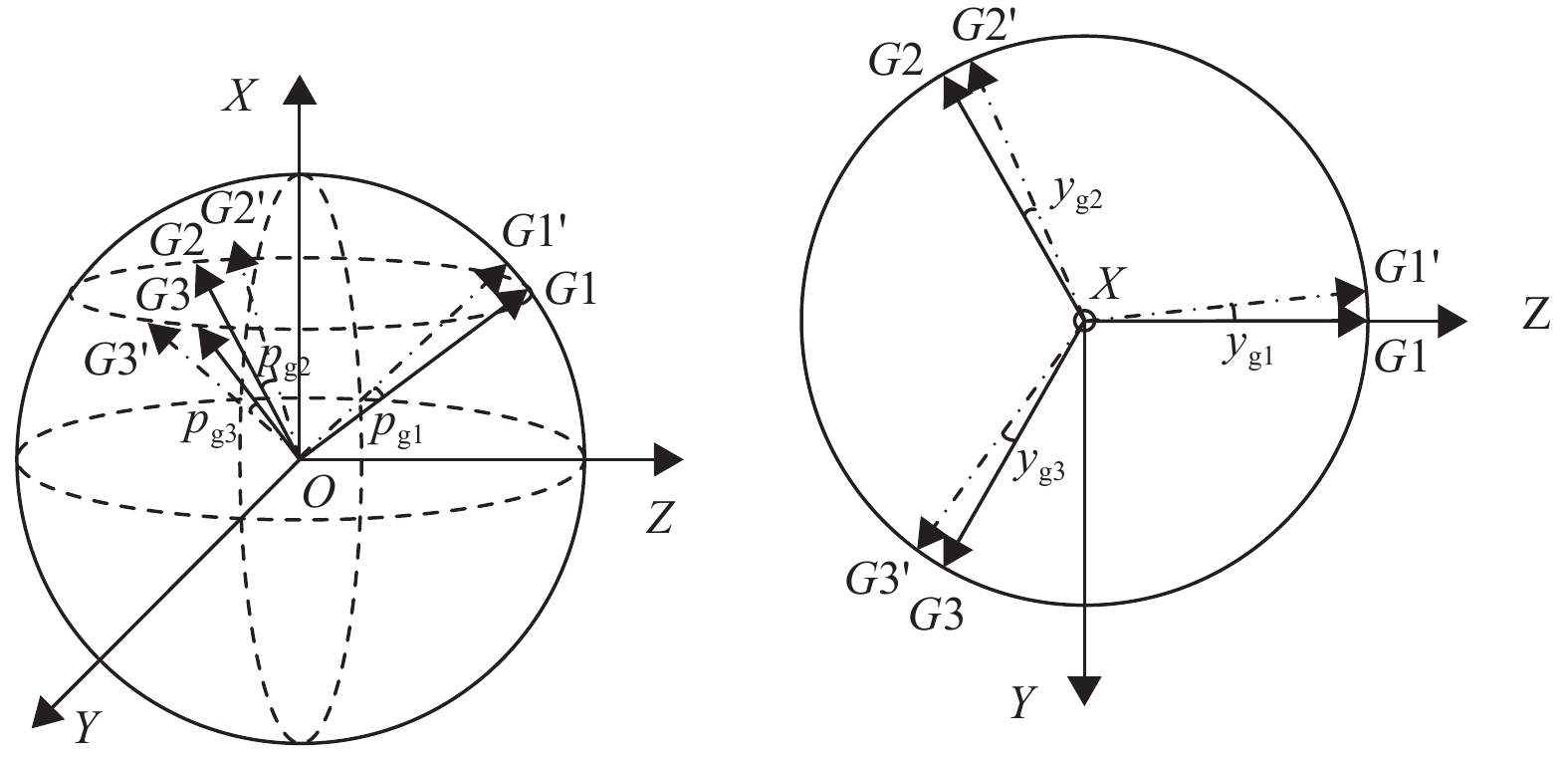
图 23S构型IMU陀螺输入轴空间安装示意图
Fig. 2Space installation diagram of IMU gyro input axis in 3S configuration

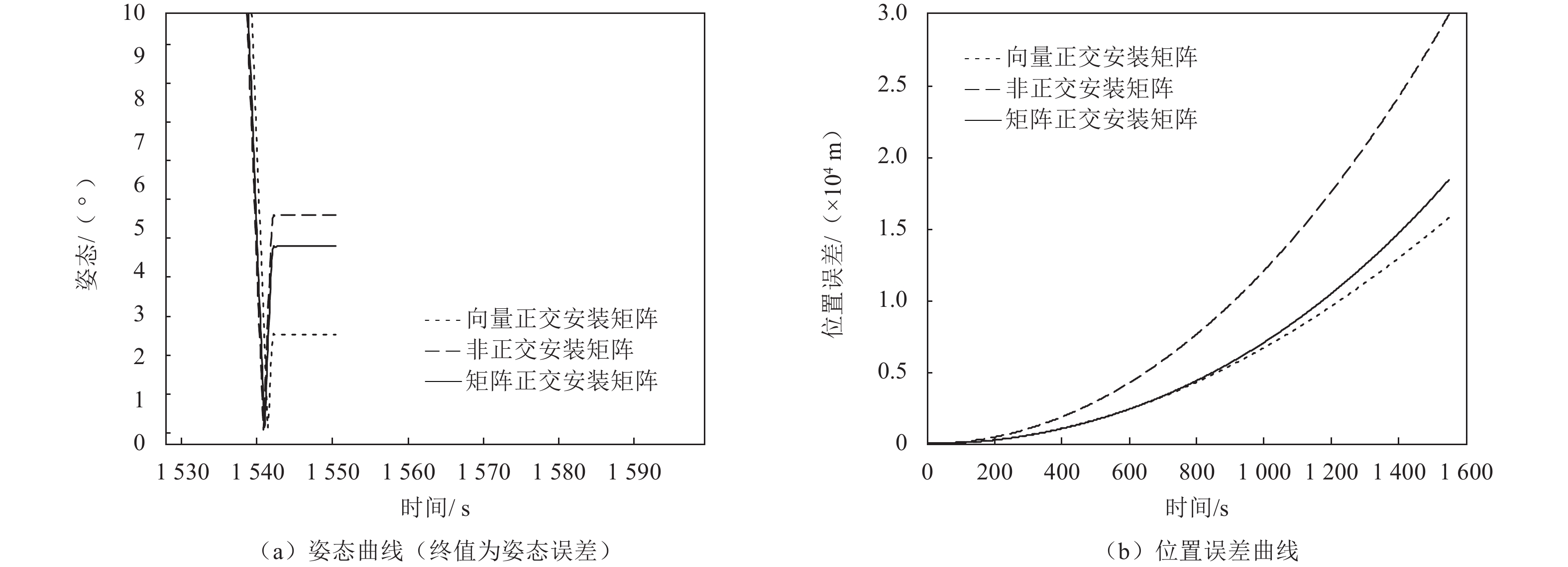
图 3IMU静态900 s惯导测试姿态曲线与位置误差曲线
Fig. 3Attitude curve and position error curve of IMU static 900 s inertial navigation test

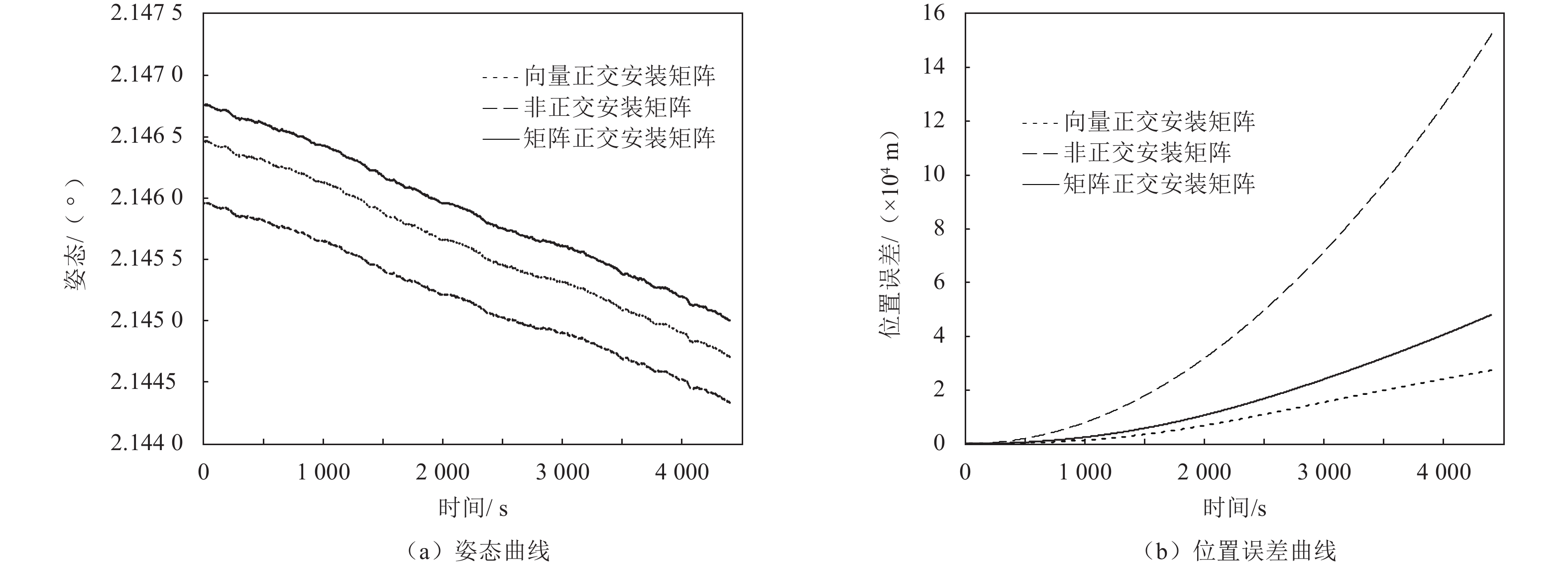
图 4IMU静态4 400 s惯导测试姿态曲线与位置误差曲线
Fig. 4Attitude curve and position error curve of IMU static 4400 sinertial navigation test

图 5IMU绕X轴以10 °/s转25 min惯导测试姿态曲线与位置误差曲线
Fig. 5Attitude curve and position error curve of IMU inertial navigation test at 10 °/s in 25 min aroundX-axis

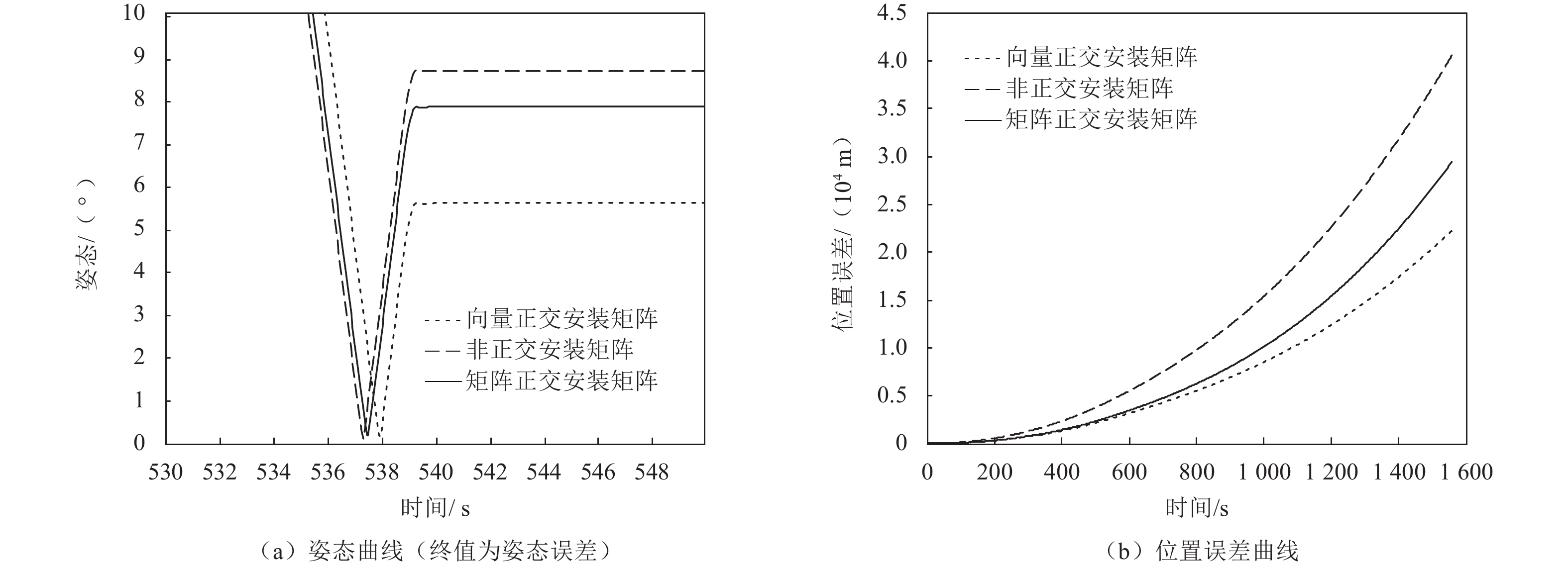
图 6IMU绕X轴以30 °/s转500 s惯导测试姿态曲线与位置误差曲线
Fig. 6Attitude curve and position error curve of IMU inertial navigation test at 30 °/s in 500 s aroundX-axis
表 1安装矩阵不同正交化处理后典型工况IMU惯导标定测试结果对比
Table 1Table1 Comparison of IMU inertial navigation calibration test results under typical working conditions after different orthogonalization of installation matrix
序号 典型工况 旋转角度/
(°)非正交位姿误差/
〔(°),km〕矩阵正交位姿误差/
〔(°),km〕行向量正交位姿
误差/〔(°),km〕位姿性能提升值/
〔(°),km〕姿态与位置性能提升百分比/% 惯导仿真曲线 1 静态900 s — (0.019,6.059) (0.016,1.792) (0.016,0.864) (0.003,5.195) (15.8,85.7) 图3 2 静态4 400 s — (0.186,152.525) (0.157,48.053) (0.157,27.383) (0.029,125.142) (15.9,82.0) 图4 3 10 °/s转
25 min15 000 (5.613,29.997) (4.786,19.095) (2.542,15.771) (3.071,14.226) (54.7,47.4) 图5 4 30 °/s转500 s 15 000 (8.721,40.587) (7.892,29.408) (5.632,22.236) (3.089,18.351) (35.4,45.2) 图6 注:序号为3、4的动态工况,在转动停止后进行了转台回零操作,但全程数据均参与了导航解算。  下载:
导出CSV
下载:
导出CSV
-
[1] 黄翔宇,徐超,胡荣海,等. 火星精确定点着陆多信息融合自主导航与控制方法研究[J]. 深空探测学报(中英文),2019,6(4):348-357.HUANG X Y,XU C,HU R H,et al. Research of autonomous navigation and control scheme based on multi-information fusion for Mars pinpoint landing[J]. Journal of Deep Space Exploration,2019,6(4):348-357. [2] 薛连莉,翟峻仪,葛悦涛. 2020年国外惯性技术发展与回顾[J]. 导航定位与授时,2021,8(3):59-67.XUE L L,ZHAI J Y,GE Y T. Development and review of foreign inertial technology in 2020[J]. Navigation Positioning and Timing,2021,8(3):59-67. [3] 任顺清, 陈希军, 王常虹. 惯导检测设备的检测及试验技术(第1版)[M]. 北京: 科学出版社, 2017. [4] 秦永元. 惯性导航(第三版)[M]. 北京: 科学出版社, 2020. [5] 袁保伦,饶谷音,廖丹. 光学陀螺旋转式惯导系统的安装误差效应分析[J]. 系统工程与电子技术,2010,32(11):2407-2411.YUAN B L,RAO G Y,LIAO D. Mounting error analysis for rotating inertial navigation system with optical gyroscopes[J]. Systems Engineering and Electronics,2010,32(11):2407-2411. [6] 严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019. [7] 王坚,梁建,韩厚增. 低成本IMU的多位置旋转现场标定方法[J]. 中国惯性技术学报,2017,25(3):294-298.WANG J,LIANG J,HAN H Z. Method for low-cost IMU in-field calibration through multi-position rotation[J]. Journal of Chinese Inertial Technology,2017,25(3):294-298. [8] 张福斌,周振华. 一种惯性测量单元非正交安装的单轴转位方法[J]. 中国惯性技术学报,2017,25(2):161-165.ZHANG F B,ZHOU Z H. Single-axis rotation modulation for non-orthogonal installation of IMU[J]. Journal of Chinese Inertial Technology,2017,25(2):161-165. [9] 马亚平,魏国,周庆东. 改进的IMU传感器安装误差正交补偿方法[J]. 传感器与微系统,2016,35(9):9-13.MA Y P,WEI G,ZHOU Q D. An improved method of orthogonal compensation for IMU installation error[J]. Transducer and Microsystem Technologies,2016,35(9):9-13. [10] BRITTING K R. 惯性导航系统分析[M]. 王国臣, 李倩, 高伟, 等译. 北京: 国防工业出版社, 2017. [11] 冯士伟, 李勇, 林松, 等. 一种深空探测用3S光纤陀螺石英加计惯性测量单元[C]//月球和深空探测国际学术研讨会. 北京: [s. n. ], 2019.FENG S W, LIN Y, LIN S, at al. A 3-slant IMU composition of fiber optic gyroscope and quartz-accelerometer for deep-space detection[C]//International Symposium on Lunar and Deep Space. Beijing, China: [s. n. ], 2019. [12] GAO P,LI K,SONG T,er al. An accelerometers-size-effect self-calibration method for triaxis rotational inertial navigation system[J]. IEEE Transactions on Industrial Electronics,2018,65(2):1655-1664.doi:10.1109/TIE.2017.2733491 [13] CHEN J Y, ZHANG D L, HAN G T, et al. A method for lever arm estimation in INS/GPS integration using direct unscented kalman filter[C]//2020 IEEE 6th International Conference on Computer and Communications (ICCC). Chengdu, China: [IEEE], 2020. [14] 王海波,张汉武,张萍萍,等. 基于横向地球坐标的惯性导航方法[J]. 中国惯性技术学报,2016,12(6):716-722.WANG H B,ZHANG H W,ZHANG P P,et al. Inertial navigation algorithm for polar region based on transverse terrestrial coordinate[J]. Journal of Chinese Inertial Technology,2016,12(6):716-722. [15] GAO P,LI K,WANG L,et al. Four-position heading effect calibration algorithm for rotation inertial navigation system based on fiber optic gyro[J]. Optical Engineering,2016,55(7):1051-1058. [16] 魏莉莉,黄军,傅长松,等. 带斜置元件的光纤陀螺捷联惯组标定方法[J]. 中国惯性技术学报,2015,23(1):14-19.WEI L L,HUANG J,FU C S,et a1. Calibration method of FOG strap down IMU with skewed sensor axis[J]. Journal of Chinese Inertial Technology,2015,23(1):14-19. [17] GAO W,ZHANG Y,WANG J G. Research on inertial alignment and self-calibration of rotary strap down inertial navigation systems[J]. Sensors,2015,15:3154-3171.doi:10.3390/s150203154 [18] HU J,CHENG X H,ZHU Y X,et al. On-line integrated correction of attitude and heading for singleaxis rotary SINS[J]. Journal of Southeast University(Natural Science Edition),2016,46(3):494-498. [19] HUANG X Y,LI M D,WANG X L,et al. The Tianwen-1 guidance,navigation,and control for Mars entry,descent,and landing[J]. Space:Science and Technology,2021(1):84-96. -

 下载:
下载:





计量
- 文章访问数:12
- 被引次数:0
