

 下载:
下载:














-
制动捕获是火星探测的关键阶段,也是整个工程任务的技术难点[1-5]。不同于常规地球卫星变轨,火星探测器在制动捕获阶段具有点火窗口窄,变轨精度要求高等特点,且机会仅有一次,若错过该窗口整个工程任务则宣告失败[6-8]。
火星探测器制动捕获点火时刻设定在近火点附近,通过减速将双曲线轨道变为大偏心率的椭圆轨道,围绕火星飞行。和近地卫星相比,火星制动捕获阶段动力学环境和空间环境更为复杂,涉及探测器从以太阳为中心的椭圆轨道,过渡到以火星为中心的双曲线轨道,再通过变轨转换为火心系下的椭圆轨道,轨道之间的拼接必须精细建模,避免拼接误差造成设计值与实际值之间的偏差[9-10]。在近火点制动由于点火弧段长,不能直接使用点脉冲形式的变轨策略[11],应将重力损失考虑在内[12-13]。此外,制动阶段器上操作多,与地面通信延时大(器地距离约2亿km,双向通信时延约20 min),在变轨阶段设计轨控姿态时应考虑帆板光照、测控天线覆盖等限制条件,以优化能源、器地通信资源。同时考虑点火姿态建立时星敏感器的可用条件。
目前地外天体探测中制动捕获策略的制订通常以有限推力方法得到最优的点火方向,推力方向控制包括固定方向推力、匀速转动方向推力、沿迹反向推力,对燃料最优下的控制方法研究较多,而对整器条件下约束状态研究较少。文献[14]分析了月球探测时,第一次月球捕获失败情况下,卫星飞出月球影响后的轨道状态,并提出了重建月球捕获的设计方法。但该文只考虑了轨道机动的设计思路,未对测控等其它约束条件做分析。文献[15]提出虚拟卫星法,以能量最优方式计算火星探测器的制动捕获策略,该方法可以将发动机工作效率最大化,燃料消耗最小,但探测器需要根据实时递推的轨道改变点火姿态,不适合工程实际应用。文献[16]同时考虑火星制动捕获目标轨道精度和燃料消耗,利用动态加权的方式制定制动捕获时的多目标优化策略,但未考虑初始轨道误差、发动机推力偏差、敏感器误差等因素。
本文从中国首次火星探测任务探测器工程设计出发,参考捕获前后的标称轨道,利用牛顿迭代法递推得到最优的推力方向和点火近点角,再结合探测器的帆板、天线、姿态敏感器布局等因素,综合考虑整器的能源、测控约束,以及点火姿态建立过程中星敏感器的可用状态,确定最优的三轴点火姿态。
-
航天器在近心点变轨远比中高轨类卫星远心点变轨复杂,不仅在点火弧段涉及重力损失因素,还需考虑建立点火姿态时星敏之类的姿态敏感器遮挡等问题,此外光照、测控等条件也比远心点变轨恶劣。
近火点制动一方面使得探测器被火星引力捕获,成为火星卫星,另一方面,还需满足半长轴、倾角控制等条件,进入预定的工作轨道[17]。在此基础上,选择推力时间最短的轨控策略。
近心点制动常用策略有固定推力方向和最优推力方向2类[18],前者在轨控阶段航天器保持固定惯性姿态,常规地球卫星大多采用该种方式。后者需航天器实时递推轨道近点角,根据近点角解算当前的最佳推力方向,因此航天器的姿态随时间而不断改变。相比较而言,后者消耗的燃料更少,效率更高,但由于轨控期间姿态在不断地非线性变化,在工程应用中给控制系统的控制精度提出了很高的要求;同时目标姿态计算与轨道计算耦合,轨道递推误差需控制在一定范围内,否则会导致目标姿态的偏差。因此,考虑工程应用中的各种约束因素,本文的轨控策略采用固定推力方向的方式。
-
本文使用的坐标系包括火星天球参考系(Mars Celestial Reference System,ACRS)、火星平赤道坐标系(火星惯性系,见图1)、探测器本体系。
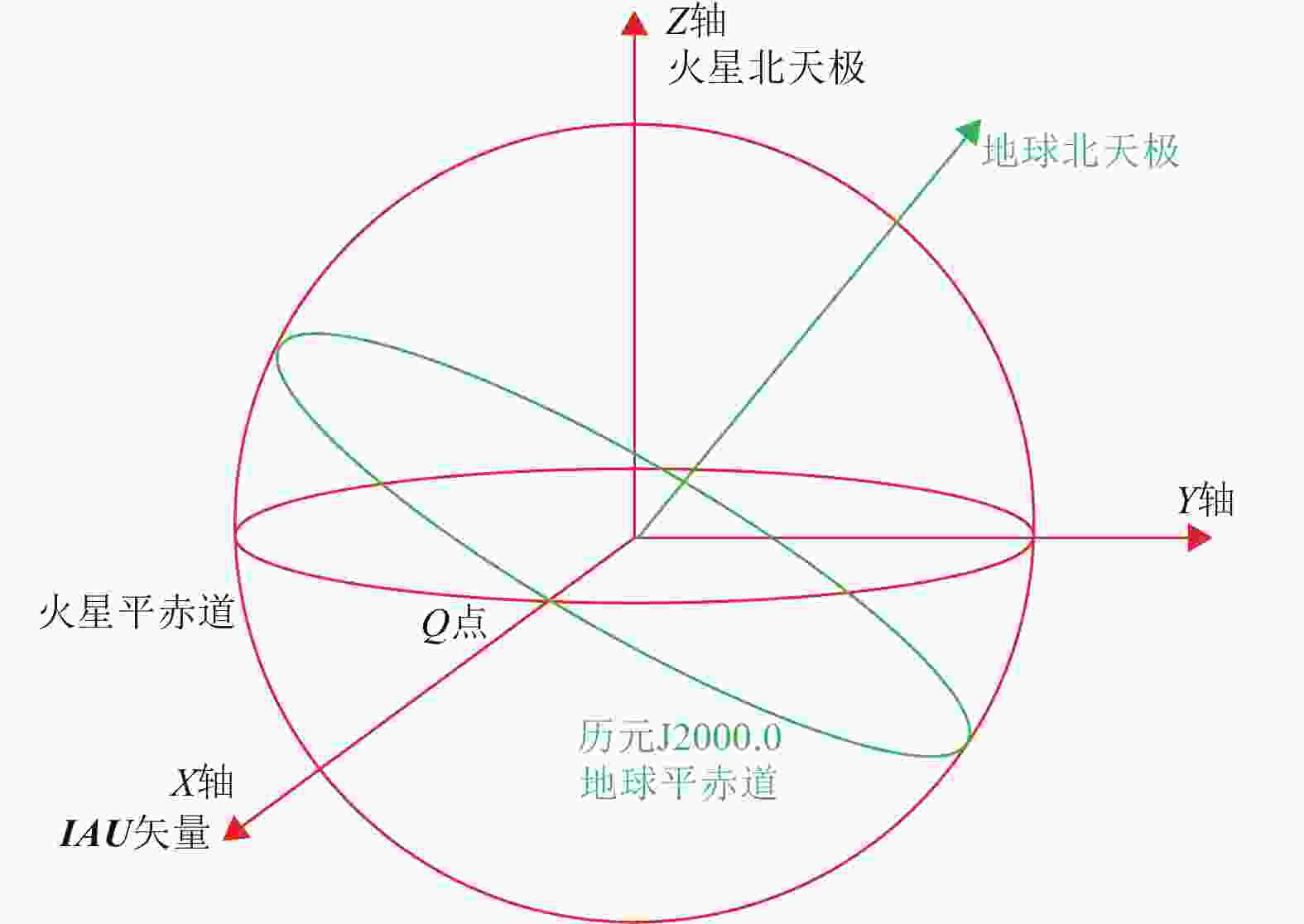
图 1火星平赤道坐标系
Figure 1.Mars mean equatorial coordinate
1)火星天球参考系
坐标原点是火心,此坐标系坐标轴平行于历元(J2000.0)地心天球坐标系,XY坐标面接近历元(J2000.0)时刻的平赤道,X轴接近指向该历元的平春分点。
2)火星平赤道坐标系(火星惯性系)
火星历元平赤道为参考平面,IAU(International Astronomical Union)矢量为参考方向,IAU矢量由火星质心指向火星历元平赤道与地球J2000.0历元平赤道面的交点Q,Q点定义为火星平赤道相对于地球平赤道的升交点。主要用于环火运行段轨道计算、轨道根数表达等。在本文中简称火星惯性系。
3)探测器本体系
原点在探测器质心位置,X轴指向着陆器方向,发动机推力矢量指向+X轴;Y轴过质心指向帆板方向;Z轴过质心,与探测器本体系X轴、Y轴构成右手直角坐标系,见图2。
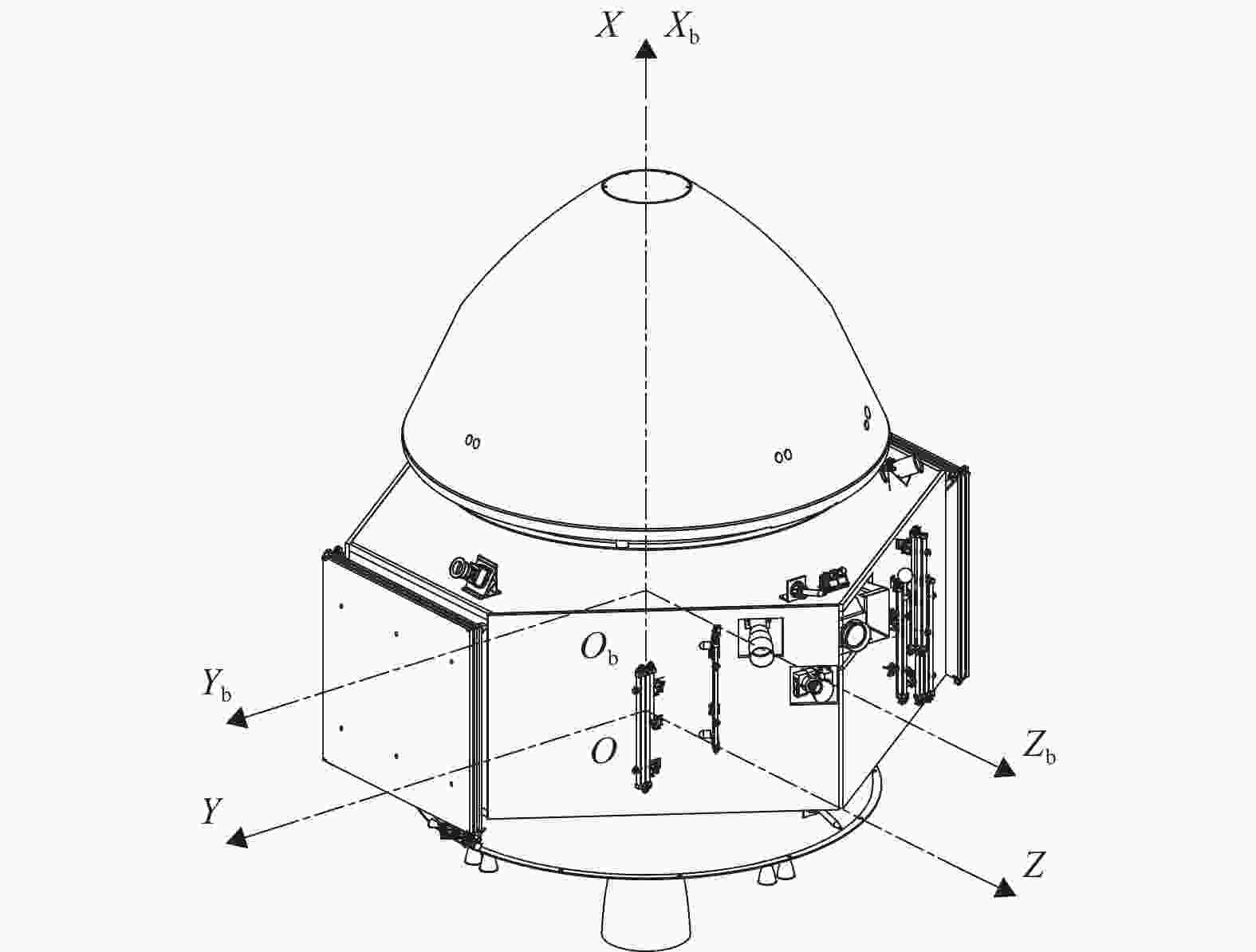
图 2探测器本体系
Figure 2.Body coordinate of Probe
-
制动捕获轨道示意见图3。火星探测的状态参数为位置
${\boldsymbol{ r }}$ 、速度$ {\boldsymbol{v}} $ 和质量$ m $ ,满足以下轨道动力学方程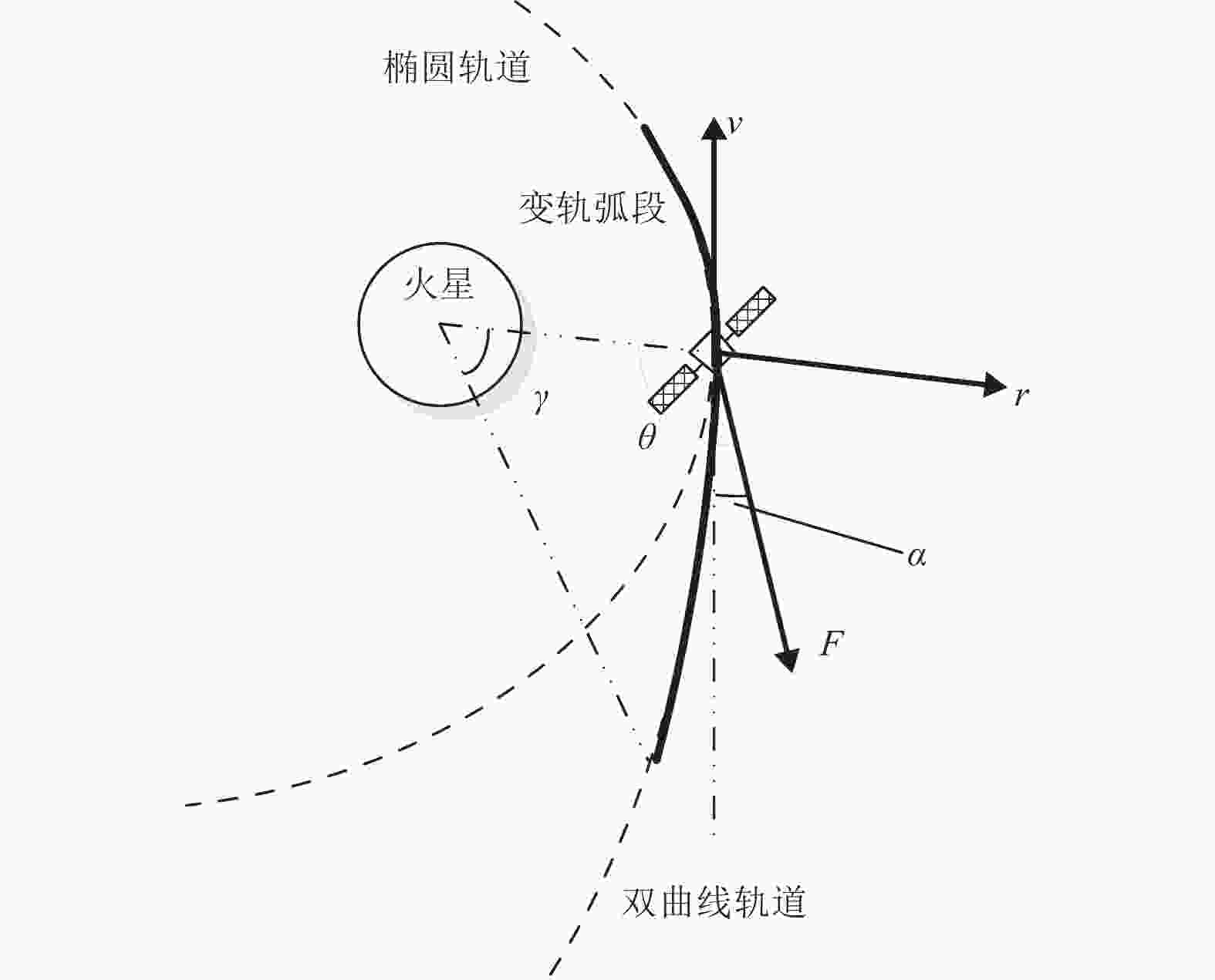
图 3制动捕获轨道示意
Figure 3.Braking to capture orbit
$$ \dot {\boldsymbol{v}}(t) = - \mu \frac{{{\boldsymbol{r}}(t)}}{{{r^3}(t)}} + \frac{\boldsymbol F}{{m(t)}} $$ (1) 其中:
$\,\mu$ 为火星引力大小;F为发动机推力矢量。假设发动机开机时间为
$ {t_0} $ ,关机时刻为${t_{\rm{f}}}$ ,则整个阶段产生的速度增量为$$ \Delta {\boldsymbol{v}} = - {{\boldsymbol{u}}_e}\ln \frac{{{m_{\rm{f}}}}}{{{m_0}}} + \int_{{t_0}}^{{t_{\rm{f}}}} {{\boldsymbol{g}}\cos \theta } {\rm{d}}t $$ (2) 其中:
${{\boldsymbol{u}}_e}$ 为推力器喷气速度,在恒定推力以及比冲固定条件下,该值为常值;$ \theta $ 为推力矢量与重力矢量夹角。式(2)中后一项为火星引力引起的重力损失,当点火时间无限短,趋近于脉冲推力时,重力损失为0。并且变轨点离引力中心越远,引力损耗越小。因此近火点制动捕获策略寻优,可看作寻找重力损失最小的轨控弧段和推力方向。 -
如图1所示,在固定推力方向且平面内变轨时,标称近心点位置和速度分别是r和v,推力方向在r和v确定的平面内,推力方向角定义为
$ \alpha $ ,为推力F与速度v的夹角,该参数为一个寻优的变量。点火时刻对应的真近点角$ \gamma $ 为另一个寻优变量,通常取为负值。在燃料消耗最少的约束条件下,发动机为固定推力,因此点火时间越短燃料消耗越少。目标速度增量$ \Delta {{\boldsymbol{v}}_{\rm{f}}} $ 根据当前轨道和制动后目标轨道计算得到。优化约束条件为总速度增量与目标值偏差最小,且点火时长最短。最佳点火时刻和点火方向可认为是非线性方程下的最优解问题。寻优方案采用牛顿迭代法,根据文献[19]和文献[20],在本文所述的求解场景中具有收敛特性,设
$$ \begin{aligned}[b] &\xi=\left[ {\begin{array}{*{20}{c}} \alpha \\ \gamma \end{array}} \right]\\ & {{G}}(\xi )=\left[ {\begin{array}{*{20}{c}} {\left\| {\Delta {{\boldsymbol{v}}_{\rm{f}}} - \Delta {\boldsymbol{v}}} \right\|} \\ {{t_{\rm{f}}}} \end{array}} \right] \end{aligned} $$ (3) 其中,
$\left\| {\Delta {{\boldsymbol{v}}_{\rm{f}}} - \Delta {\boldsymbol{v}}} \right\|$ 为实际速度增量与目标值的偏差。迭代算法为$$ \begin{aligned}[b] &{\xi _{{\rm{k}} + 1}} = {\xi _{\rm{k}}} - {\left( {\frac{{\partial {{G}}({\xi _{\rm{k}}})}}{{\partial {\xi _{\rm{k}}}}}} \right)^{ - 1}}{{G}}({\xi _{\rm{k}}}) \\ &\dfrac{{\partial {{G}}({\xi _{\boldsymbol{k}}})}}{{\partial {\xi _{\boldsymbol{k}}}}} = \left( {\begin{array}{*{20}{c}} {\dfrac{{\partial \left\| {\Delta {{\boldsymbol{v}}_{\rm{f}}} - \Delta {\boldsymbol{v}}} \right\|}}{{\partial \alpha }}}&{\dfrac{{\partial \left\| {\Delta {{\boldsymbol{v}}_{\rm{f}}} - \Delta {\boldsymbol{v}}} \right\|}}{{\partial \gamma }}} \\ {\dfrac{{\partial {t_{\rm{f}}}}}{{\partial \alpha }}}&{\dfrac{{\partial {t_{\rm{f}}}}}{{\partial \gamma }}} \end{array}} \right) \end{aligned} $$ (4) 其中偏导数由差分计算得出,递推流程见图4:
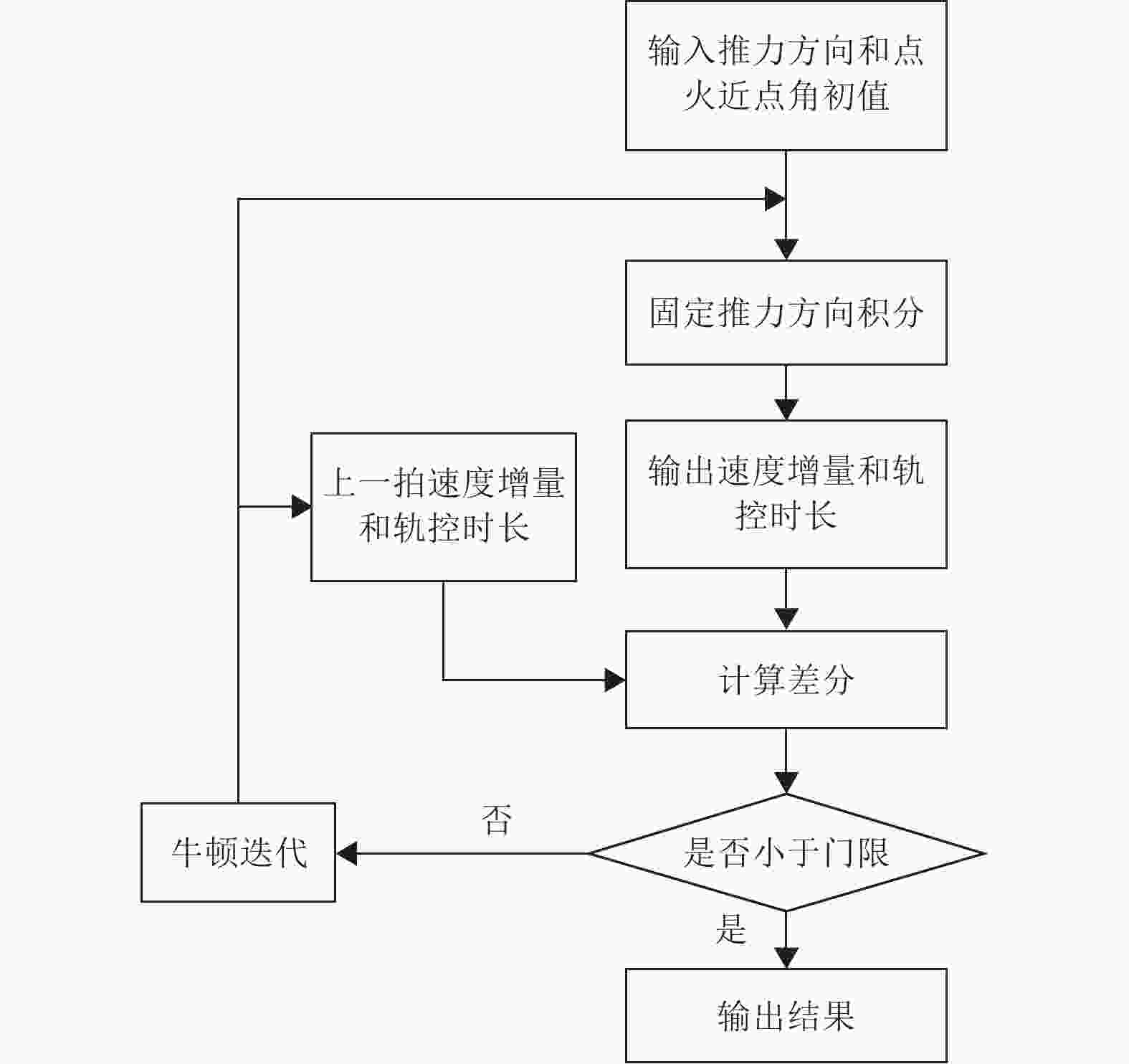
图 4参数寻优策略递推流程
Figure 4.Recursive process of parameter optimization strategy
待速度增量和轨控时间小于阈值,输出相应的轨控参数。
-
根据中国首次火星探测任务火星探测器标称轨道设计,制动捕获时轨控前后轨道参数见表1,捕获过程见图5。
表 1轨控前后轨道参数(火心惯性系)
Table 1.Parameters before and after orbit control (Mars inertial coordinate)
历元 a/km e i/(°) Ω/(°) ω/(°) f/(°) 变轨前 UTC2021,2,10,12,0,0 –695 6.475 27 1.545 61 10.999 9 176.981 115.368 137 0.00 变轨后 961 71.055 7 0.960 53 10.999 9 176.981 115.368 137 0.00 按照1.2节所述的方法,设置迭代参数以及探测器参数,见表2。
表 2迭代参数
Table 2.2 Iteration parameters
初始质量/kg 推力/N 比冲/s 初始近点角/(°) 初始推力方向角/(°) 4 461.4 3 000 312 –48 3 迭代4次,得到最优轨控参数。得到推力矢量在J2000系下投影为[0.365 417 –0.917 02 –0.159 828],见表3。
表 3最优轨控策略
Table 3.3 Optimal orbit control strategy
近点角/(°) 推力方向角/(°) 推力矢量 轨控时长/s 燃料消耗/kg 34.69 0.06 –0.365 417 895 953.356 –0.917 02 –0.159 828 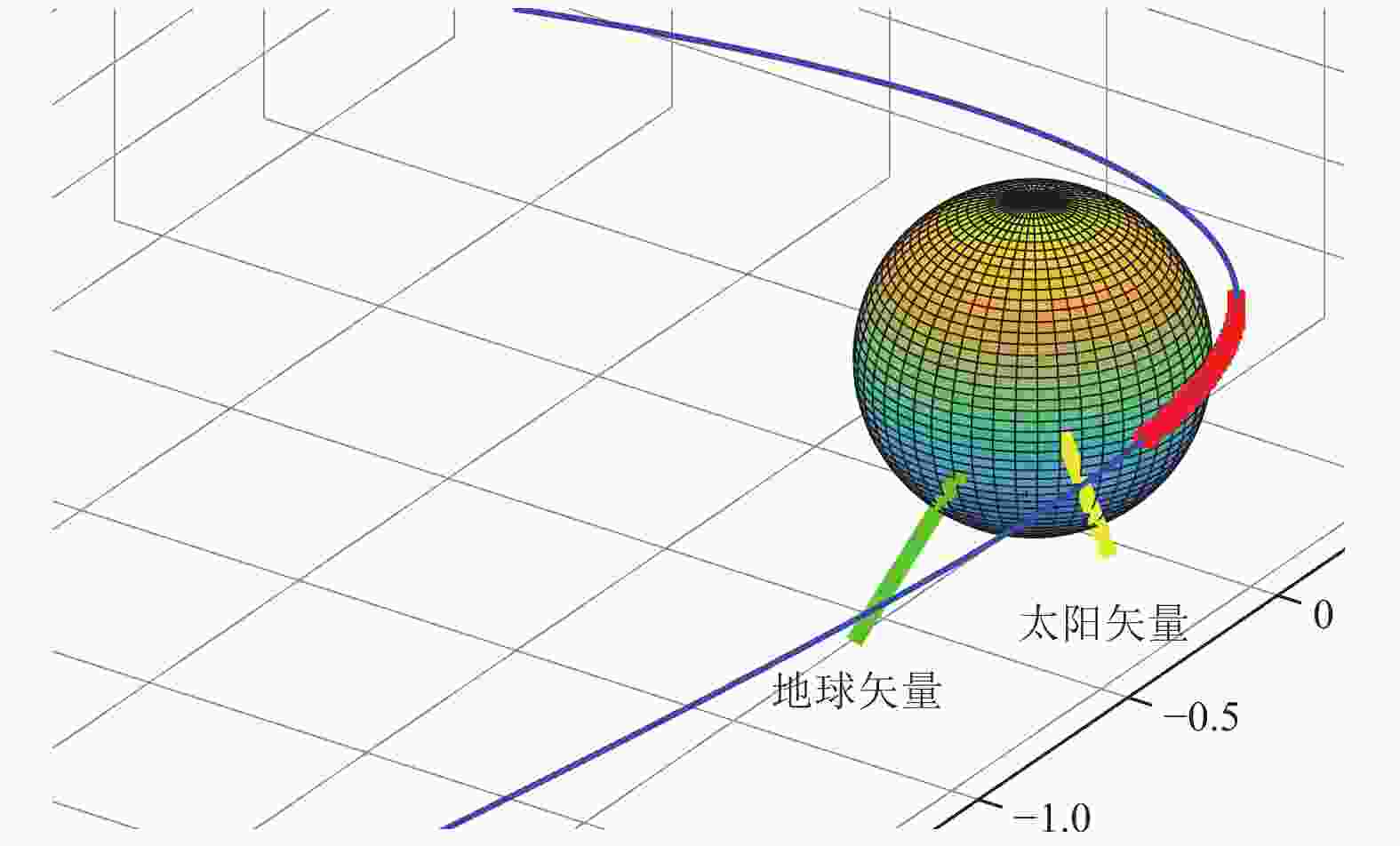
图 5捕获过程
Figure 5.Capture process
-
探测器变轨采用三轴稳定控制方式,除推力轴平行于目标推力方向外,另外两轴的约束需综合考虑光照、测控、敏感器遮挡等约束条件。另外,探测器姿控系统使用星敏建立点火惯性基准,随后在轨控期间使用陀螺积分实时确定当前姿态。因此点火姿态需考虑星敏的可用性,避免受光照以及天体遮挡造成星敏输出无效。
-
探测器发动机推力方向平行+X轴,两翼帆板对称安装在Y轴上,可绕Y轴转动跟踪对日。轨控阶段需保证一定的帆板高度角,满足能源需求。2根测控收发天线布局在+X–Z象限,与+X轴夹角分别为45°和25°,波束角分别为50°和25°,在轨控期间需保证天线波束覆盖地球,满足遥控遥测地面上下行的需求。
定义探测器+Y轴平行轨道面负法线时为轨控零姿态,在此基础上绕+X轴旋转不同角度,分析不同姿态下帆板受照高度角。
图6为轨控姿态偏置角度与帆板光照角关系,由于太阳在探测器+X方位,绕滚动轴旋转对帆板光照影响较小,考虑充电功率下降不小于7%的约束条件,偏置角度应控制在40°以内。
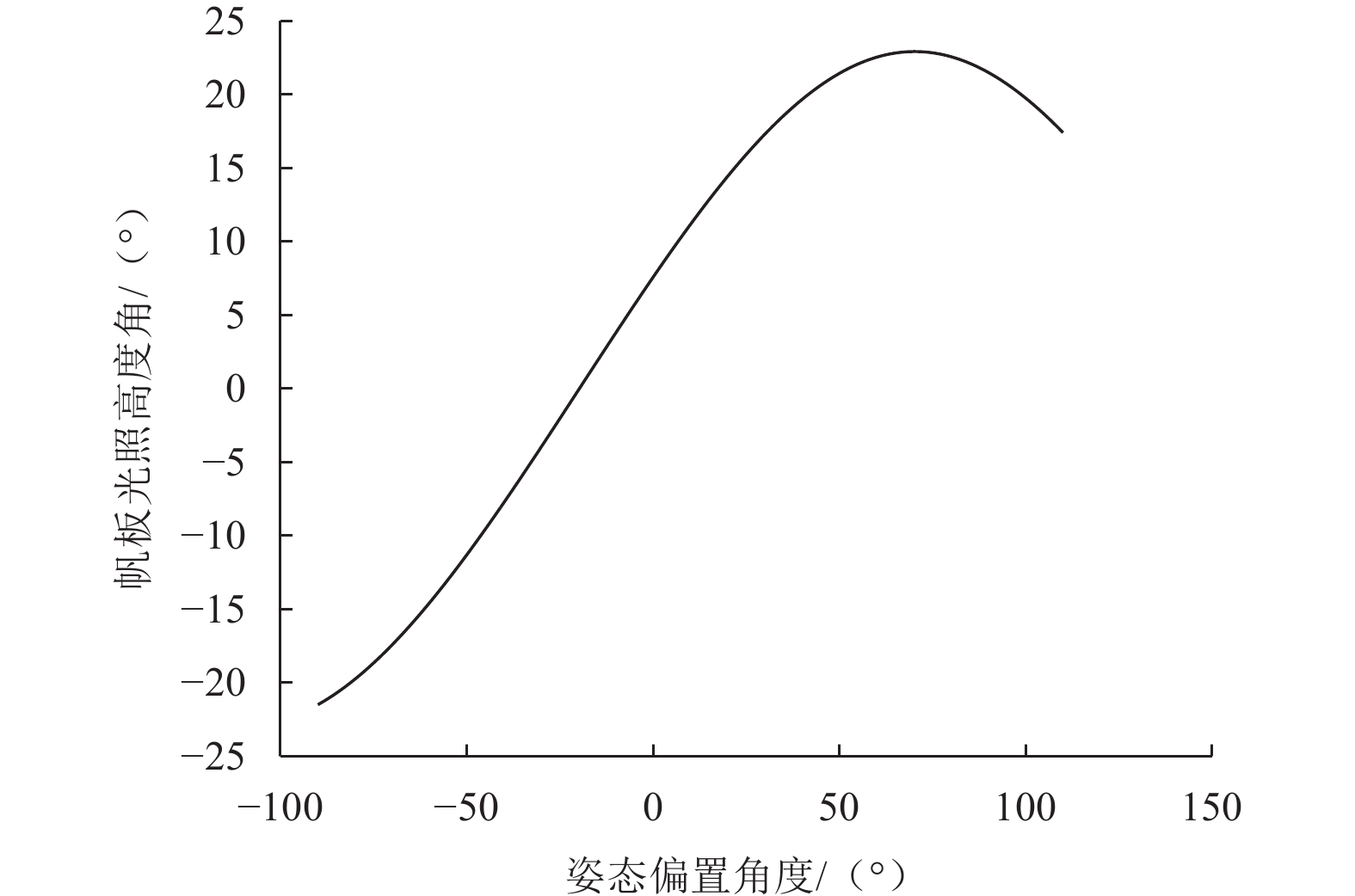
图 6帆板高度角与姿态偏置角曲线
Figure 6.Curve of SODA board angle and attitude offset angle
图7中细线为天线波束可以覆盖地球的姿态偏置角度区域。为保证轨控期间测控的有效性,姿态偏置角应在–14°~111°范围内。
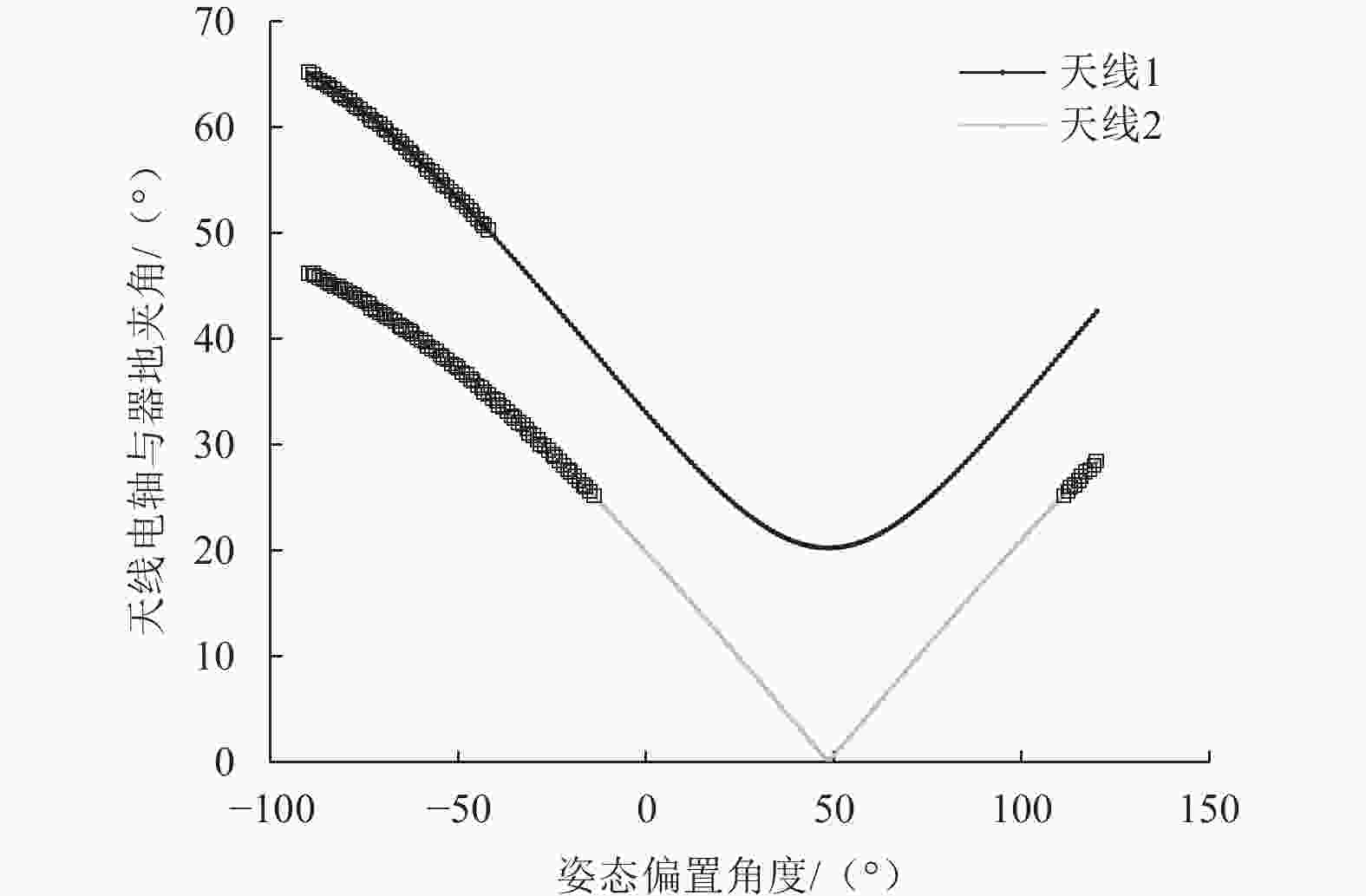
图 7天线波束覆盖情况
Figure 7.Antenna beam coverage
-
中国首次火星探测任务探测器配备了4台星敏感器,布局及星敏视场角如图8,星敏光学参数见表4。
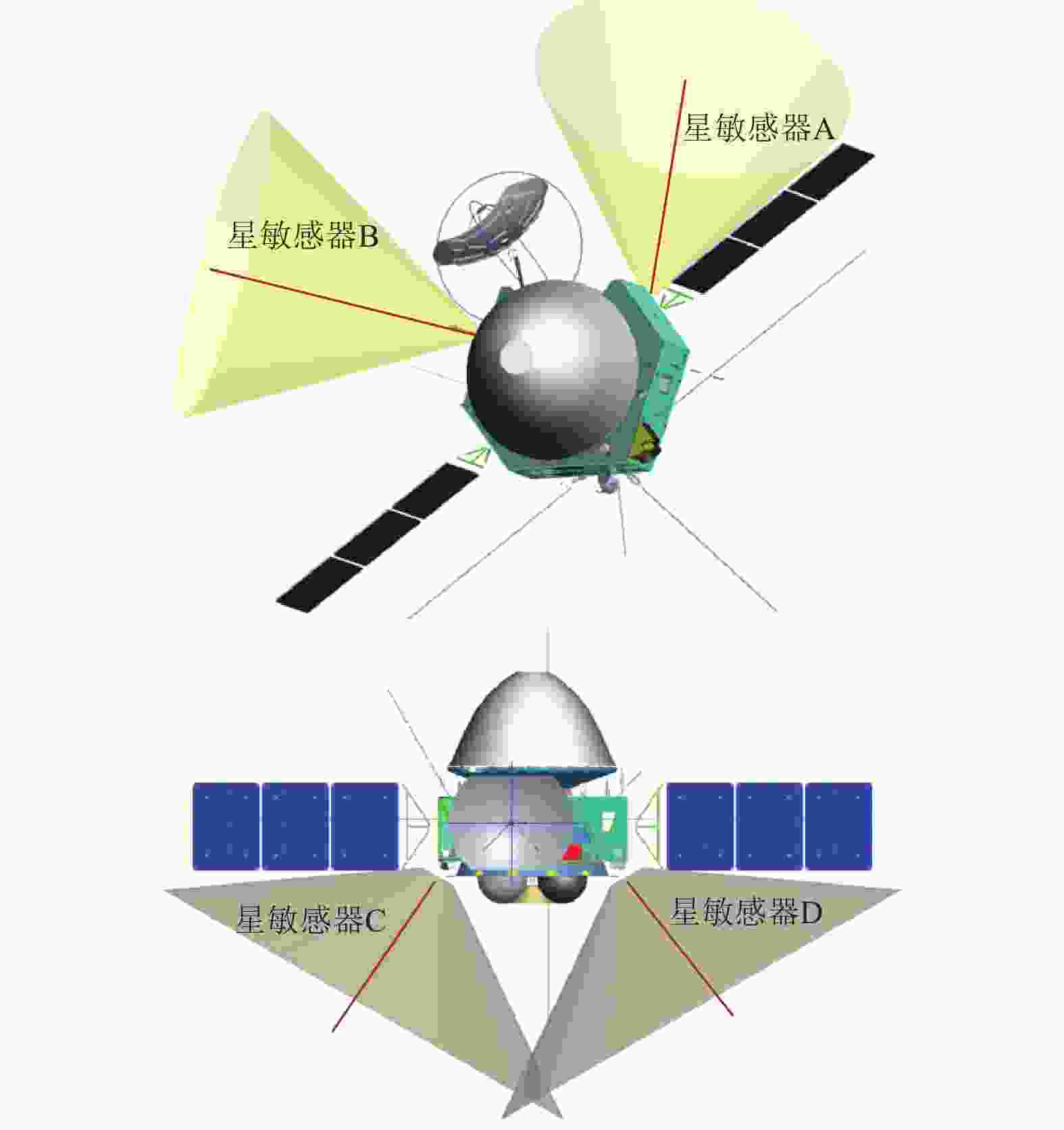
图 8星敏布局
Figure 8.Star sensor layouts
表 4星敏光学参数
Table 4.4 Star sensor optical parameter
项目 光轴矢量(本体系投影) 视场角/(°) 星敏A –0.5,–0.496 73 ,–0.709 406 20 星敏B 0.5,0.533 18,–0.682 44 20 星敏C –0.866 03,–0.5,0 20 星敏D –0.866 03,0.5 ,0 20 为保证轨控阶段星敏基准有效,探测器在任意时刻至少保证2台星敏正常工作,以实现双矢量定姿;在此基础上可用星敏数尽可能多,可用工作时间尽可能长,以实现系统冗余配置。选取轨控前2 h至轨控后3 h的时间段,统计不同姿态偏置角下可用星敏台数的持续时间,统计结果如图9。
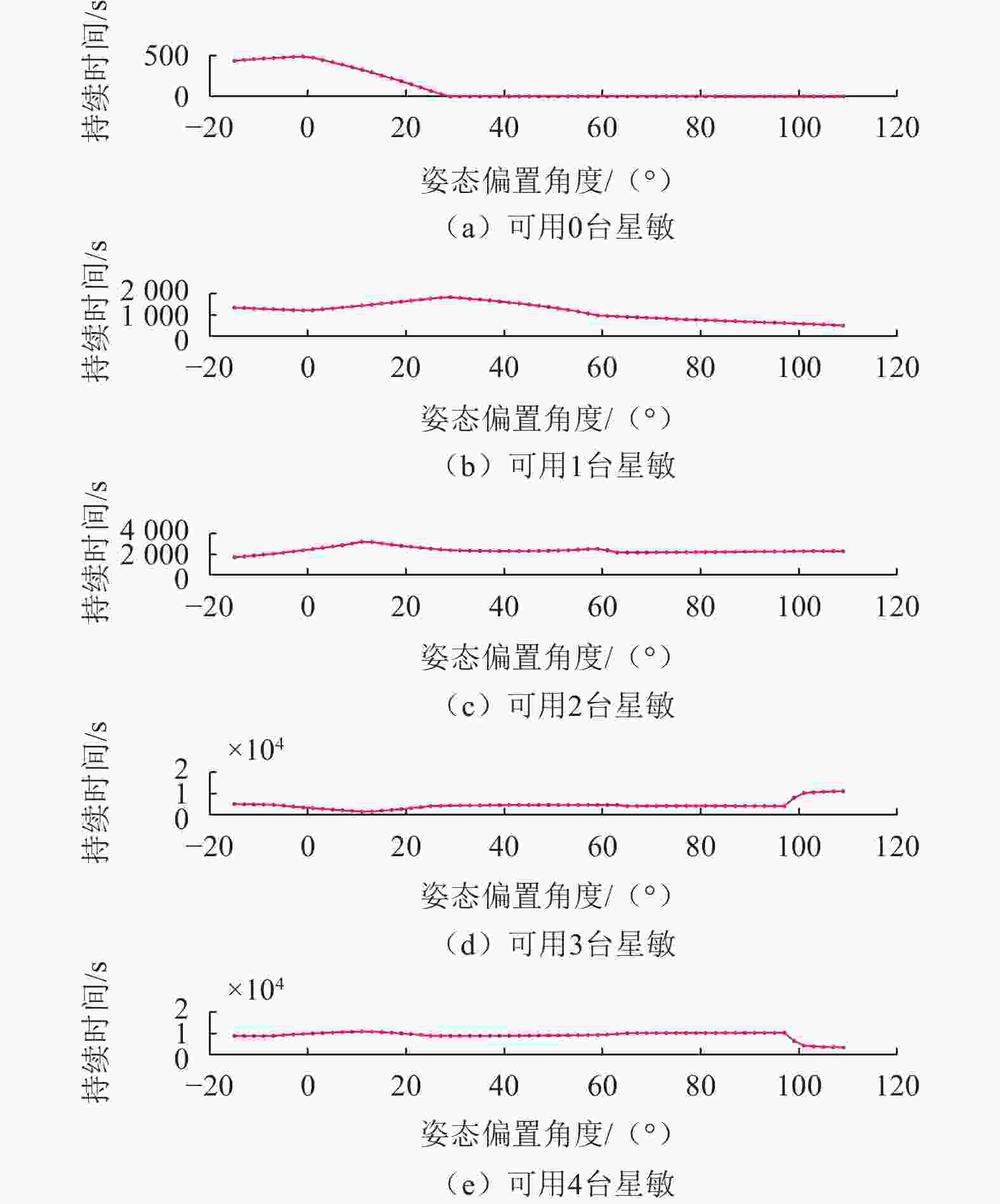
图 9星敏可用时间
Figure 9.Star sensor availability time
从图9看出,姿态偏置超过31°后,在任意时刻可以保证至少1台可用。同时随着角度增加,仅有1台星敏可用的持续时间逐渐减少,综合光照条件在40°以内的约束,确定最优偏置角度为40°,得到此时点火惯性姿态四元数
$$ {\boldsymbol{Q}} = \left[ {{\text{0}}{\text{.511\;02 }}-{\text{0.236\;96 }}\;\;{\text{0.471\;13 }}-{\text{0.678\;784}}} \right] $$ 图10黑色曲线表示在偏置40°时,各星敏光轴与器火矢量夹角,灰色为从探测器视角看过去的火星视场张角与星敏保护角之和,当夹角小于火星张角与星敏视场角之和时,火星进入星敏视场,此时星敏无法正常输出,在图中表现为黑色曲线小于灰色曲线的部分。从图中看出,各星敏均存在不可用时段,通过姿态偏置实现各台星敏交替有效,错峰使用。
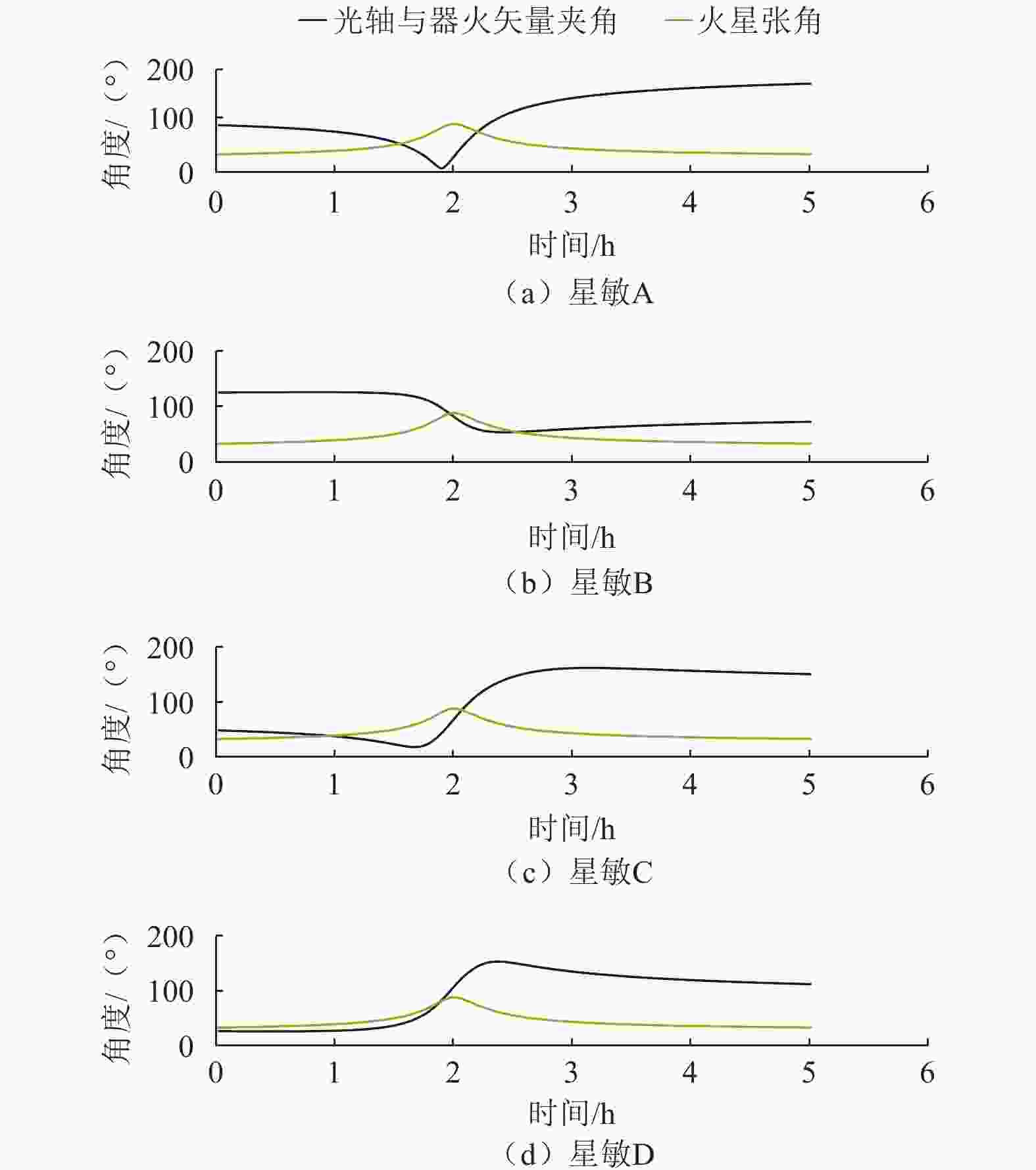
图 10星敏光轴与器火矢量夹角(姿态偏置40°)
Figure 10.Angle between optical axis of star sensor and vector of probe-Mars
-
中国首颗火星探测器“天问一号”(Tianwen-1)于北京时间2021年2月10日19点49分21秒实施近火制动捕获,3 000 N发动机点火878 s,目标速度增量675.87 m/s,半长轴和偏心率变化如图11所示。
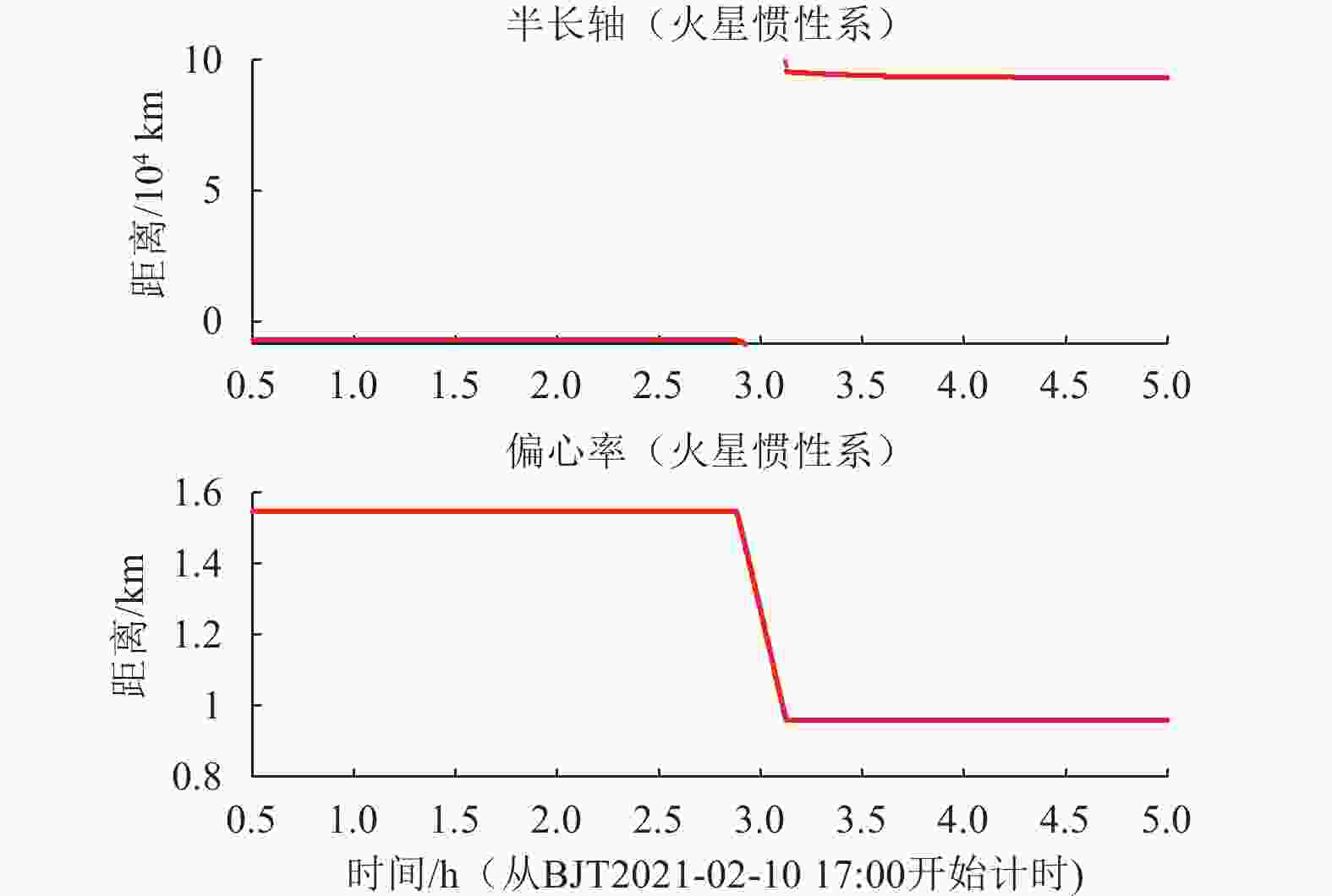
图 11半长轴和偏心率变化
Figure 11.Change of semi-major axis and eccentricity
实测轨控前后轨道参数变化和控制误差情况如表5。
表 5轨道参数变化①
Table 5.Change of orbital parameters
项目 Δa/km Δe Δi/(°) ΔΩ/(°) Δω/(°) ΔM/(°) 变化量 102 346.152 –0.588 31 –0.005 19 0.047 28 –0.101 59 0.00 轨控偏差 947.122 1.89 × 10–5 2.104 × 10–3 2.481 × 10–3 1.724 × 10–3 2.773 5 × 10–4 注:①为控后24 h的测定轨结果。 制动捕获实现探测器环绕火星飞行,控制目标为10 d的轨道周期以及相应的偏心率。和理论设计值相比,制动捕获半长轴控制偏差947.122 km,轨道周期偏差为17 861 s。需要说明的是,由于捕获后轨道偏心率极大,倾角较小,在远火弧段受到光压摄动和火星球体扁率联合影响,实际轨道周期与瞬时轨道周期有较大差别。根据“天问一号”实际飞行情况,在2021年2月15日17点35分46秒到达远火点,实际轨道周期偏差为17 308 s,即在5 d的飞行期间轨道周期变化了553 s。
点火姿态根据实际捕获倾角参数采用偏置40°策略,轨控期间各星敏输出有效性标志,遥测结果如图12,星敏工作时段见表6。
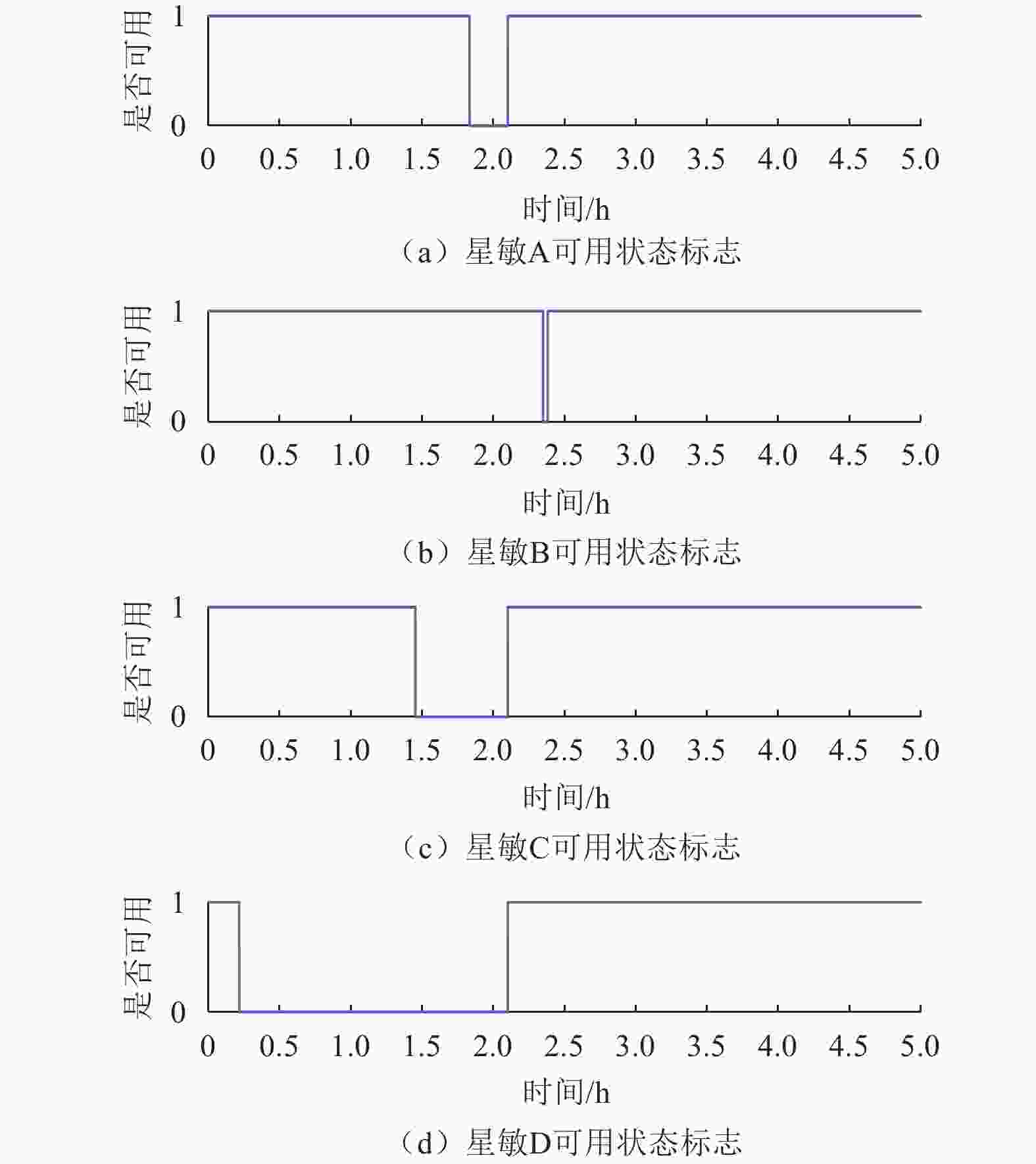
图 12星敏可用标志状态
Figure 12.Status of star sensor available flag
表 6星敏工作时段
Table 6.6 Star sensor working hours
星敏 开始受遮挡时刻/h 结束受遮挡时刻/h 仿真 实际 偏差 仿真 实际 偏差 星敏A 1.698 1.883 0.185 2.191 2.102 –0.089 星敏B 2.125 2.349 0.224 2.303 2.382 0.079 星敏C 1.510 1.452 –0.058 2.117 2.102 –0.015 星敏D 0.226 0.215 6 –0.010 4 2.117 2.102 –0.015 注:表中的时刻h均以BJT2021-2-10-17-30-0为零点,相对该点的相对时刻。 图12中1代表星敏可用,0代表不可用,从BJT2021-02-10 17:30开始计时。可以看在制动捕获过程中,星敏状态字变化与仿真结果一致,误差小于0.225 h。
根据实际轨道和实际姿态计算出捕获段各星敏光轴与火星夹角情况如图13。
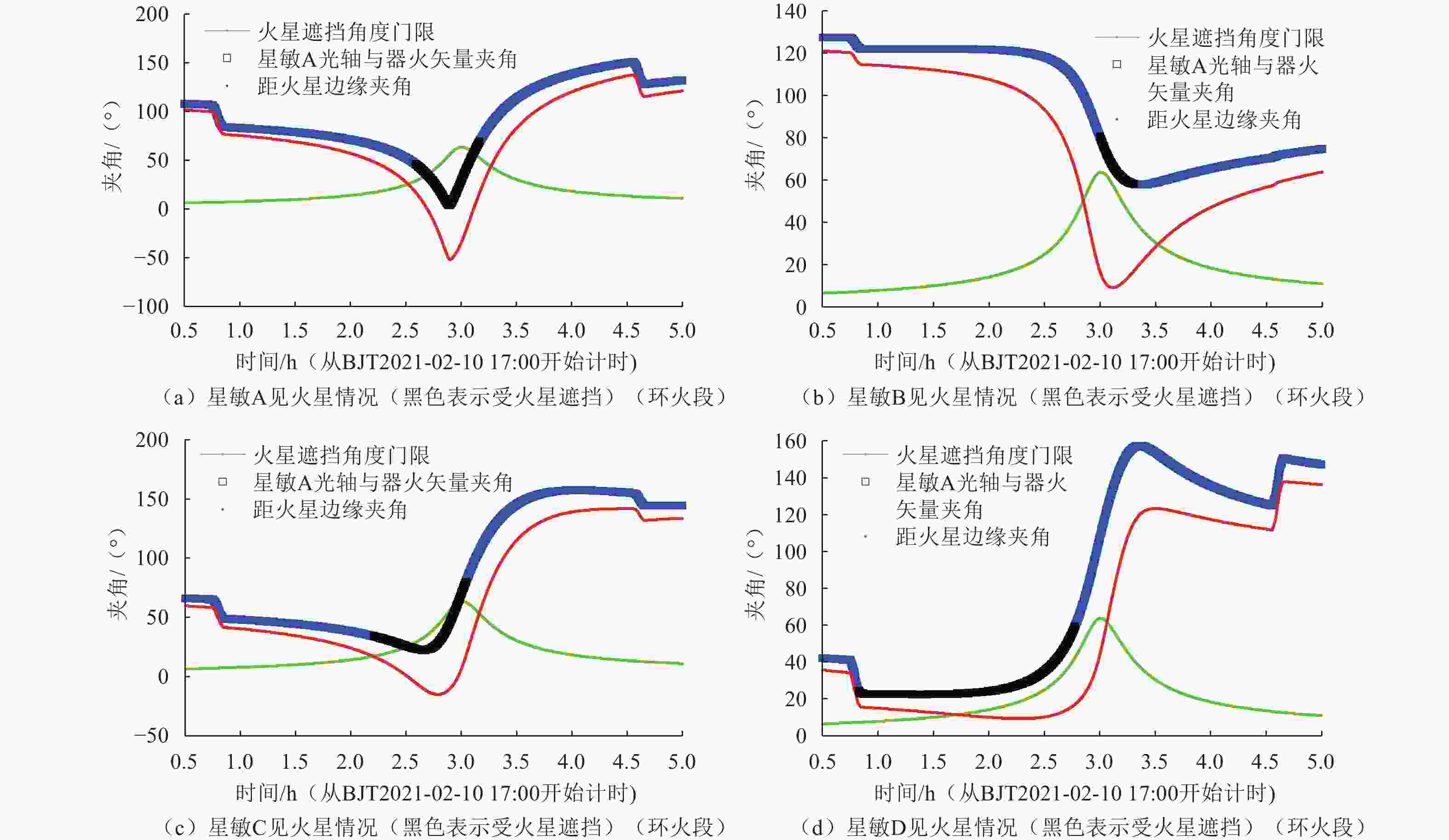
图 13捕获段星敏与火星视场关系
Figure 13.Relationship between star sensor and field of view of Mars for braking and capture
在捕获段各个星敏均出现因天体遮挡导致不可用的时间段,起止时间实现相互交错,使得在任意时刻均有星敏可用。
捕获制动过程中探测器在固定40°姿态偏置条件下,低增益天线1和中增益天线除星掩区时间段外,均处于可用状态,保障了对地通信的需求,捕获段天线覆盖情况如图14。
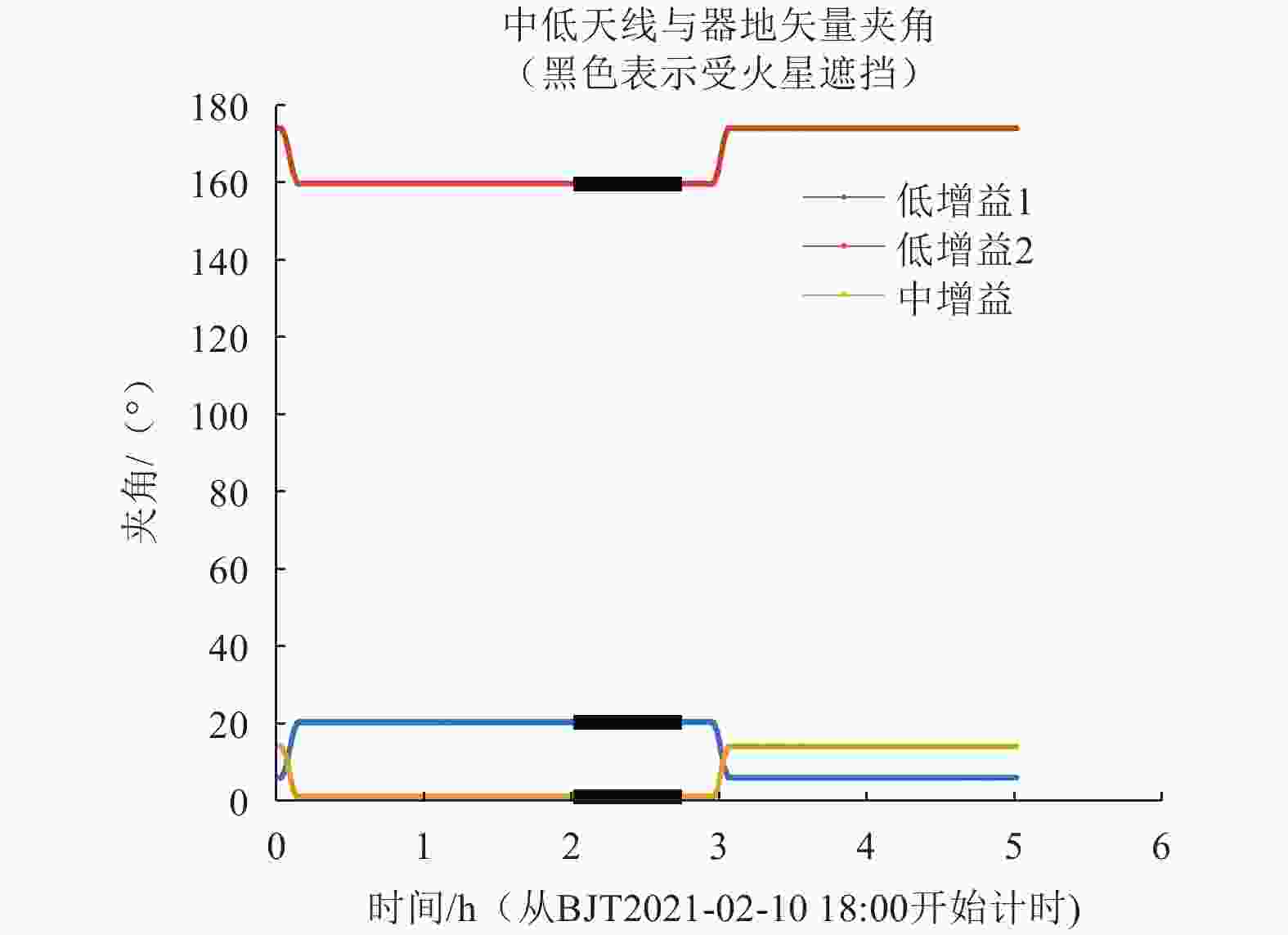
图 14捕获段天线覆盖情况
Figure 14.Antenna coverage of Mars for braking and capture
-
本文根据中国首次火星探测任务的轨道设计以及探测器构型,利用牛顿迭代法以燃料消耗最少为目标,对推力方向和点火近点角参数进行寻优。再分析了绕推力方向不同偏置姿态时的帆板高度角以及测控天线夹角,按照轨控过程中光照和测控条件的约束,确定合理的姿态偏转范围。最后根据星敏受天体遮挡与否,计算全过程星敏的可用情况,以可用星敏数最多为优化依据,最终确定点火的三轴姿态。通过“天问一号”实际制动捕获数据表明,姿态偏置模式下星敏可用时间计算误差小于0.225 h,实际控后轨道周期与标称值相比偏差17 308 s,偏心率偏差0.002 1。
和地球卫星远地点大推力变轨相比,本文提出的制动捕获点火姿态设计思路,额外增加了重力损失、敏感器可用条件等因素,在其它天体的探测任务或地球卫星的近心点变轨等操作中,也有同样的借鉴意义。
Optimal Firing Attitude Design for Mars Probe “Tianwen-1” Braking and Capture
-
摘要:针对中国首次自主火星探测任务“天问一号”(Tianwen-1)的火星捕获制动期间点火姿态设计最优化问题,提出了整器约束条件下的分析思路和解决方法。首先建立捕获阶段的轨道动力学模型,根据捕获前轨道和捕获后的目标轨道以燃料消耗最少为优化目标,使用牛顿迭代法寻优解出轨道平面内最佳的推力方向和点火时刻,得到推力矢量。再结合探测器的光照、测控约束条件,确定了绕推力方向的偏转范围。最后参考星敏感器布局,对全过程不同偏转角度下星敏受天体遮挡情况进行分析,计算出星敏可用台数以及可用时长,按照可用时长最优的原则确定出最优的点火姿态。在轨实际制动捕获结果表明,轨控后半长轴偏差小于947.122 km(半长轴变化量102 346.152 km),偏心率偏差小于0.002 1,同时全程满足整器测控、光照的需求,捕获全过程中保持任意时刻至少有2台星敏可用,根据遥测结果对比星敏的可用时段仿真误差小于0.225 h。Abstract:To optimize ignition attitude design during Mars capture and braking of China’s first autonomous Mars exploration mission “Tianwen-1”, an analysis idea and a solution under the constraint of the whole vehicle were proposed. Firstly, the trajectory dynamics model in the capture phase was established. According to the pre-capture trajectory and the post-capture target trajectory, optimal thrust direction and ignition time in the orbit plane were solved by Newton iteration method with minimum fuel consumption as optimization objective, and thrust vector was obtained. Combined with illumination and measurement and control constraints of the detector, deflection range around thrust direction was determined. Finally, referring to the layout of star sensors, occlusion of star sensors by celestial bodies at different deflection angles during the whole process was analyzed, and the number of available star sensors and the available duration were calculated. The optimal ignition attitude was determined according to the principle of optimal available duration. The actual on-track braking capture results show that the semi-major axis deviation after track control is less than 947.122 km (semi-major axis variation of 102346.152 km), and the eccentricity deviation is less than 0.0021. At the same time, the whole process can meet the requirements of the whole device for measurement and control and illumination. During the whole acquisition process, at least two star sensors are available at any time, and compared with the telemetry results, the simulation error of the available duration of star sensors is less than 0.225 h.
-
Key words:
- Mars probe/
- braking and capture/
- firing attitude
Highlights● Determine the thrust direction with optimal fuel. ● Maximum arc length constraint for multiple star sensors. ● Analysis of braking acquisition attitude under multiple constraints. -
图 10星敏光轴与器火矢量夹角(姿态偏置40°)
Fig. 10Angle between optical axis of star sensor and vector of probe-Mars
图 13捕获段星敏与火星视场关系
Fig. 13Relationship between star sensor and field of view of Mars for braking and capture
表 1轨控前后轨道参数(火心惯性系)
Table 1Parameters before and after orbit control (Mars inertial coordinate)
历元 a/km e i/(°) Ω/(°) ω/(°) f/(°) 变轨前 UTC2021,2,10,12,0,0 –695 6.475 27 1.545 61 10.999 9 176.981 115.368 137 0.00 变轨后 961 71.055 7 0.960 53 10.999 9 176.981 115.368 137 0.00  下载:
导出CSV
下载:
导出CSV
表 2迭代参数
Table 22 Iteration parameters
初始质量/kg 推力/N 比冲/s 初始近点角/(°) 初始推力方向角/(°) 4 461.4 3 000 312 –48 3 下载:
导出CSV
表 3最优轨控策略
Table 33 Optimal orbit control strategy
近点角/(°) 推力方向角/(°) 推力矢量 轨控时长/s 燃料消耗/kg 34.69 0.06 –0.365 417 895 953.356 –0.917 02 –0.159 828 下载:
导出CSV
表 4星敏光学参数
Table 44 Star sensor optical parameter
项目 光轴矢量(本体系投影) 视场角/(°) 星敏A –0.5,–0.496 73 ,–0.709 406 20 星敏B 0.5,0.533 18,–0.682 44 20 星敏C –0.866 03,–0.5,0 20 星敏D –0.866 03,0.5 ,0 20 下载:
导出CSV
表 5轨道参数变化①
Table 5Change of orbital parameters
项目 Δa/km Δe Δi/(°) ΔΩ/(°) Δω/(°) ΔM/(°) 变化量 102 346.152 –0.588 31 –0.005 19 0.047 28 –0.101 59 0.00 轨控偏差 947.122 1.89 × 10–5 2.104 × 10–3 2.481 × 10–3 1.724 × 10–3 2.773 5 × 10–4 注:①为控后24 h的测定轨结果。 下载:
导出CSV
表 6星敏工作时段
Table 66 Star sensor working hours
星敏 开始受遮挡时刻/h 结束受遮挡时刻/h 仿真 实际 偏差 仿真 实际 偏差 星敏A 1.698 1.883 0.185 2.191 2.102 –0.089 星敏B 2.125 2.349 0.224 2.303 2.382 0.079 星敏C 1.510 1.452 –0.058 2.117 2.102 –0.015 星敏D 0.226 0.215 6 –0.010 4 2.117 2.102 –0.015 注:表中的时刻h均以BJT2021-2-10-17-30-0为零点,相对该点的相对时刻。 下载:
导出CSV
-
[1] RANIERI C L,OCAMPO C A. Indirect optimization of spiral trajectories[J]. Journal of Guidance,Control,and Dynamics,2006,29(6):1360-1366. [2] PONTANI M,CONWAY B A. Particle swarm optimization applied to space trajectories[J]. Journal of Guidance Control,and Dynamics,2010,33(5):1429-1441.doi:10.2514/1.48475 [3] GARG D A,HAGER W W,RAO A V. Pseudospectral methods for solving infiniehorizon optimal control problems[J]. Automatica,2011,47(4):829-837.doi:10.1016/j.automatica.2011.01.085 [4] HECHLER M,YANEZ A. Mars express orbit design[J]. Acta Astronautica,2003,53(4):497-507. [5] SANCHE Z PEREZ J M, CANABAL R. Review of venus express mission analysis[C]//18thInternational Symposium on Space Flight Dynamics, 2004: 245. [6] 李军锋,龚胜平. 有限推力模型火星探测捕获策略分析[J]. 中国科学:物理学力学天文学,2013,43(6):781-786.doi:10.1360/132012-318LI J F,GONG S P. Analysis of capture strategies for Mars explorer with finite-thrust[J]. Sci Sin-Phys Mech Astron,2013,43(6):781-786.doi:10.1360/132012-318 [7] 李爽,彭玉明,陆宇平. 火星EDL导航、制导与控制技术综述与展望[J]. 宇航学报,2010,3(3):621-627.doi:10.3873/j.issn.1000-1328.2010.03.001LI S,PENG Y M,LU Y P. Review and prospect of Mars EDL navigation guidance and control technologies[J]. Journal of Astronautics,2010,3(3):621-627.doi:10.3873/j.issn.1000-1328.2010.03.001 [8] 闵学龙,潘腾,郭海林. 火星探测器使命轨道捕获策略研究[J]. 航天器工程,2008,17(6):39-43.doi:10.3969/j.issn.1673-8748.2008.06.004MIN X L,PAN T,GUO H L. Analysis of orbit capture method for Mars vehicle[J]. Spacecraft Engineering,2008,17(6):39-43.doi:10.3969/j.issn.1673-8748.2008.06.004 [9] 陈杨,赵国强,宝音贺西,等. 精确动力学模型下的火星探测轨道设计[J]. 中国空间科学技术,2011,31(2):8-15.CHEN Y,ZHAO G Q,BAOYIN H X,et al. Orbit design for Mars exploration by the accurate dynamic model[J]. Chinese Space Science and Technology,2011,31(2):8-15. [10] 方宝东,吴美平,张伟. 火星引力捕获动力学与动态误差分析[J]. 力学学报,2015,47(1):15-23.doi:10.6052/0459-1879-14-327FANG B D,WU M P,ZHANG W. Mars gravity capture dynamic model and error analysis[J]. Chinese Journal of Theoretical and Applied Mechanics,2015,47(1):15-23.doi:10.6052/0459-1879-14-327 [11] EDELBAUM T N. Optimal Low-thurst transfer between circular and eliptical orbits[J]. Journal of ASME,1962,84(2):134-141. [12] GOBETZ F W. Optimal variable-thrust transfer of a power-limited rocket between neighboring circular orbits[J]. AIAA Journal,1964,2(2):339-343.doi:10.2514/3.2281 [13] JIANG F,BAOYIN H X,LI J. Practical techniques for low-thurst trajectory optimization with homotopic approach[J]. Journal of Guidance,Control,and Dynamics,2012,35(1):245-258. [14] 李革非, 韩潮. 月球捕获控制分析[C]//全国第十二届空间及运动体控制技术学术年会. 中国自动化学会: 桂林, 2006. [15] 刘玥,荆武兴. 利用虚拟卫星法求解火星探测器近火点制动策略[J]. 哈尔滨工业大学学报,2013,45(1):14-18.doi:10.11918/hitxb20130103LIU Y,JING W X. Mars probe near-center braking strategy using virtual satellite method[J]. Journal of Harbin Institute of Technology,2013,45(1):14-18.doi:10.11918/hitxb20130103 [16] 刘博,王云财,张松涛,等. 火星探测器制动捕获多目标优化策略[J]. 动力学与控制学报,2019,17(4):356-361.doi:10.6052/1672-6553-2019-032LIU B,WANG Y C,ZHANG S T,et al. Multi-objective optimization strategy for brake capture of Mars explorer[J]. Journal of Dynamics and Control,2019,17(4):356-361.doi:10.6052/1672-6553-2019-032 [17] FISCHER J, DENIS M. Mars orbit insertion — a new challenge for Europesuccess with ESA’s Mars express [C]//European Space Operations Centre. IEEEAC, European Space Operations Centre: [s. n. ], 2004. [18] 罗绪盛,麻娜,荆武兴等. 采用有限推力的火星捕获制动策略[J]. 西北工业大学学报,2017,35(2):348-354.doi:10.3969/j.issn.1000-2758.2017.02.028LUO X S,MA N,JING W X,et al. Capture and brake strategy for Mars explorer with finite-thrust[J]. Journal of Northwestern Polytechnical University,2017,35(2):348-354.doi:10.3969/j.issn.1000-2758.2017.02.028 [19] 刘玥. 火星探测器近心点制动与轨道保持优化设计[D]. 哈尔滨: 哈尔滨工业大学, 2011.LIU Y. Optimal design for Mars probe in near-center braking and orbit keeping[D]. Harbin: Harbin Institute of Technology University, 2011. [20] 朱静芬. 关于牛顿类迭代法的收敛性和误差分析[D]. 杭州: 浙江大学, 2004.ZHU J F. On the convergence and error analysis of Newton's iterative method[D]. Hangzhou: Zhejiang University, 2004. -

 点击查看大图
点击查看大图

图(14)/
表 (6)
计量
- 文章访问数:60
- HTML全文浏览量:38
- PDF下载量:19
- 被引次数:0































