

Analysis and Research on Influencing Factors of Non-Coaxial Lidar Overlap Factor Based on Ray Tracing
-
摘要:重叠因子是影响激光雷达系统探测近距离大气的一个关键因素,对其进行精确计算有利于获得更准确的探测结果. 为此,提出了一种通过光线追迹获得非同轴激光雷达系统重叠因子的仿真方法. 该方法利用ZEMAX分别对载入真实机械结构的发射系统和望远镜接收系统进行光线追迹,确定出同一距离处激光强度分布和望远镜的视场函数分布,通过计算重叠区域被望远镜视场函数加权后的激光强度占激光总强度的比例,可得到该距离处的重叠因子,最后通过不同距离处的重叠因子拟合出完整的重叠因子廓线. 此外,利用此方法对一套激光雷达系统进行了几何因子廓线仿真,并分析了系统轴间距、光轴失调角度、激光发散角、望远镜视场角以及次镜机械遮挡对系统重叠因子廓线的影响. 仿真结果表明当激光光轴偏离望远镜光轴的角度等于望远镜视场角和激光发散角差值的1/2时,远场的重叠因子不能达到1,这对激光雷达系统的设计和安装提出了更高的要求.Abstract:Overlap factor is a key factor that affects atmosphere detection of lidar system at near range. The accurate calculation of overlap factor is helpful to obtain more accurate detecting results. To this end, a simulation method was proposed based on ray-tracing technique to obtain the overlap factor of non-coaxial lidar system. Firstly, using a ZEMAX optical simulation software, the ray-tracing was carried out on the transmitter and telescope receiver loaded with mechanical structures to calculate the laser intensity distribution and the field of view (FOV) function of the telescope at a given distance. Then the ratio of the FOV-weighted laser intensity to the total intensity was calculated, obtaining the overlap value at the given distance. Finally, the full overlap profile was fitted through the overlap values at different distances. And this method was applied to simulate an overlap profile for a specific lidar system, and analyze the impact of axis displacement, optical-axis misalignment, laser divergence, the FOV of the telescope, and mechanical obstructions on the overlap profile of the system. The results show that when the deviation angle between the optical axes of the laser and the telescope is equal to half of the difference between the FOV of the telescope and the divergence angle of the laser, the overlap factor cannot reach 1 in the far-field, which puts forward higher requirements for the design and installation of the lidar system.
-
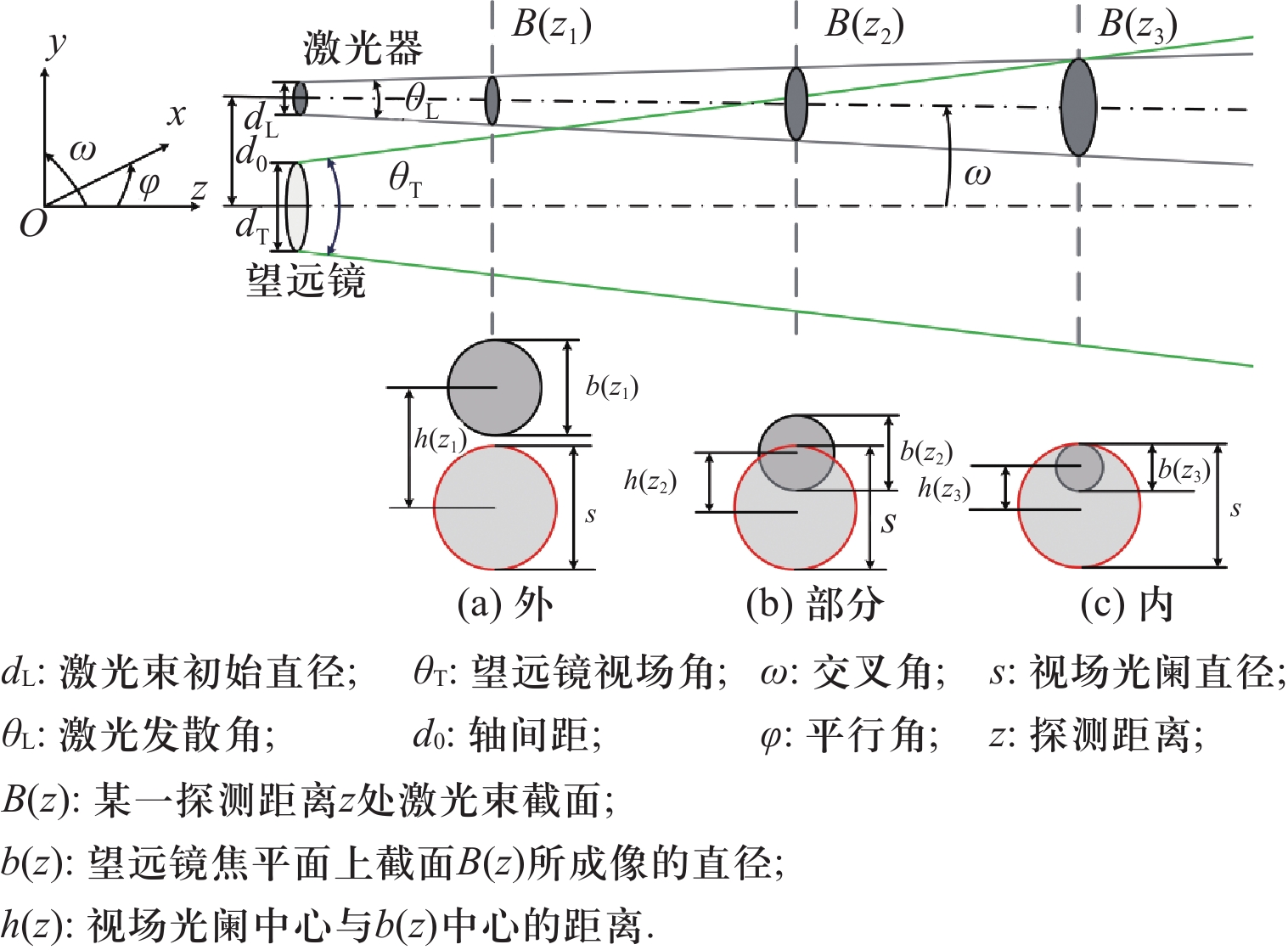
图 1理论方法中激光束和望远镜视场的关系
Figure 1.The relationship between the lidar laser beam and the FOV of the telescope using theoretical method
图 2光线追迹计算重叠因子廓线流程图
Figure 2.Flow chart for calculating overlap profile based on ray-tracing
图 3光线追迹法求解非同轴激光雷达重叠因子示意图
Figure 3.Schematic diagram of solving the overlap profile of non-coaxial lidar based on ray-tracing method
图 4探测器上激光光强和望远镜视场分布
Figure 4.Laser and the FOV distribution of the telescope on the detector
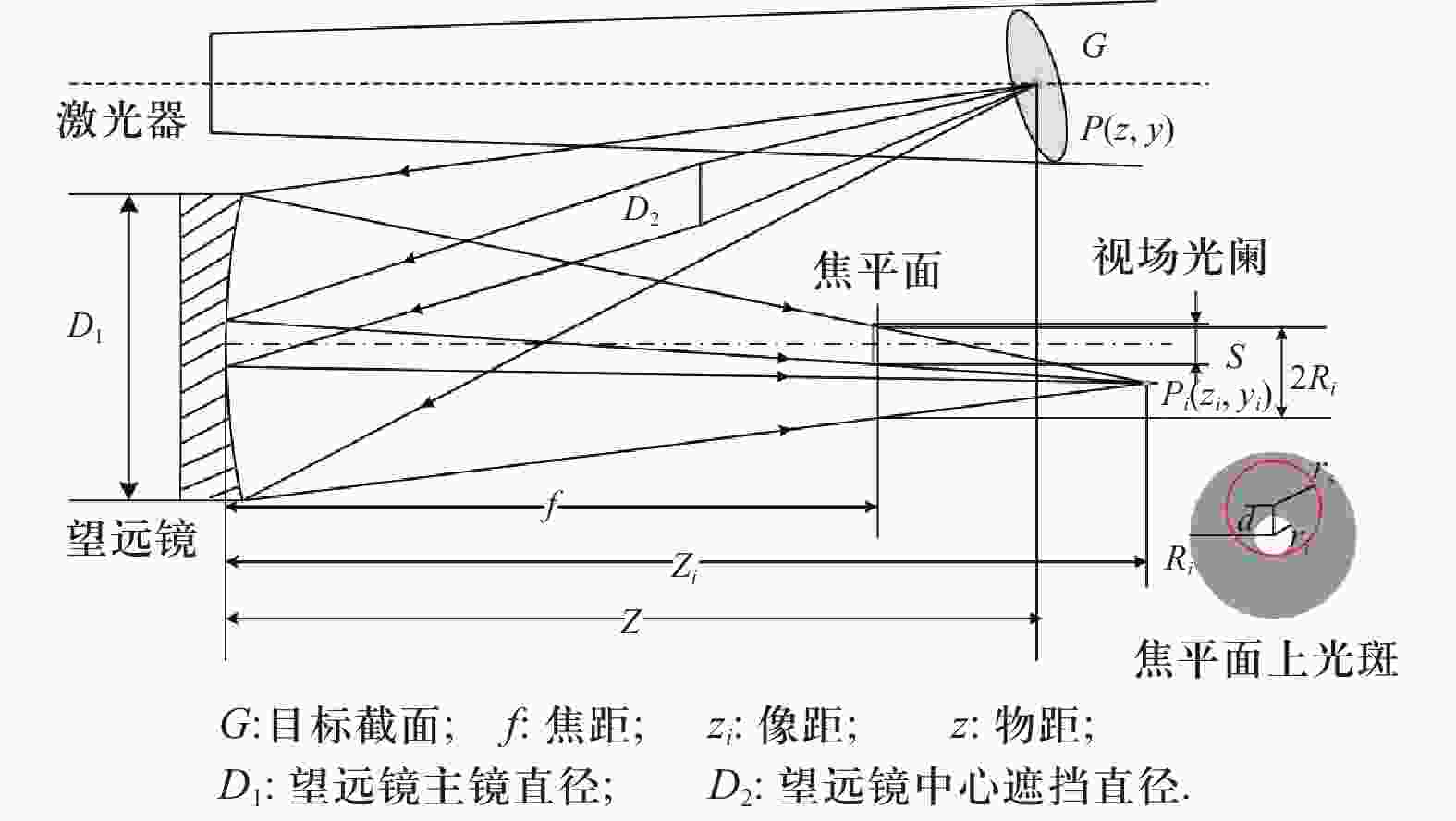
图 5非同轴激光雷达系统探测回波信号示意图
Figure 5.Schematic diagram of the echo signal detected by the noncoaxial lidar system
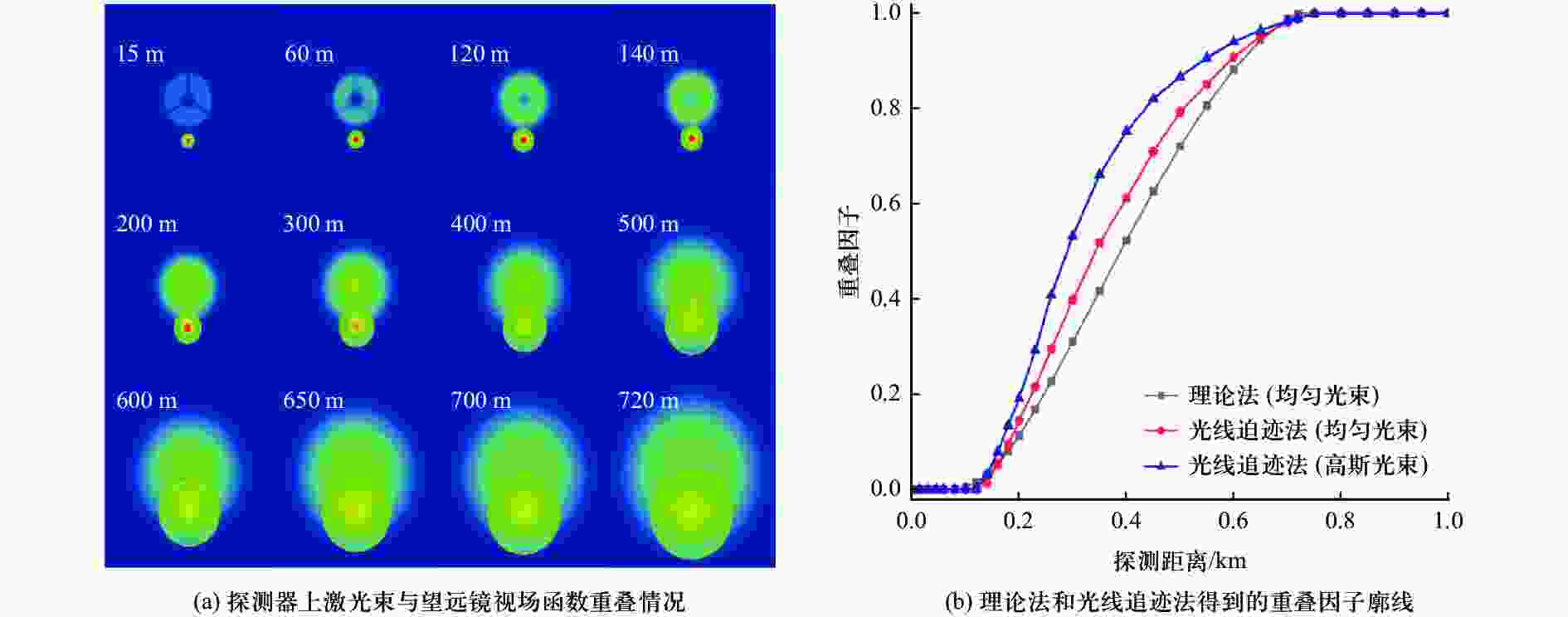
图 6光线追迹方法仿真重叠因子的结果
Figure 6.Simulation results of obtaining overlap profile based on the ray-tracing method
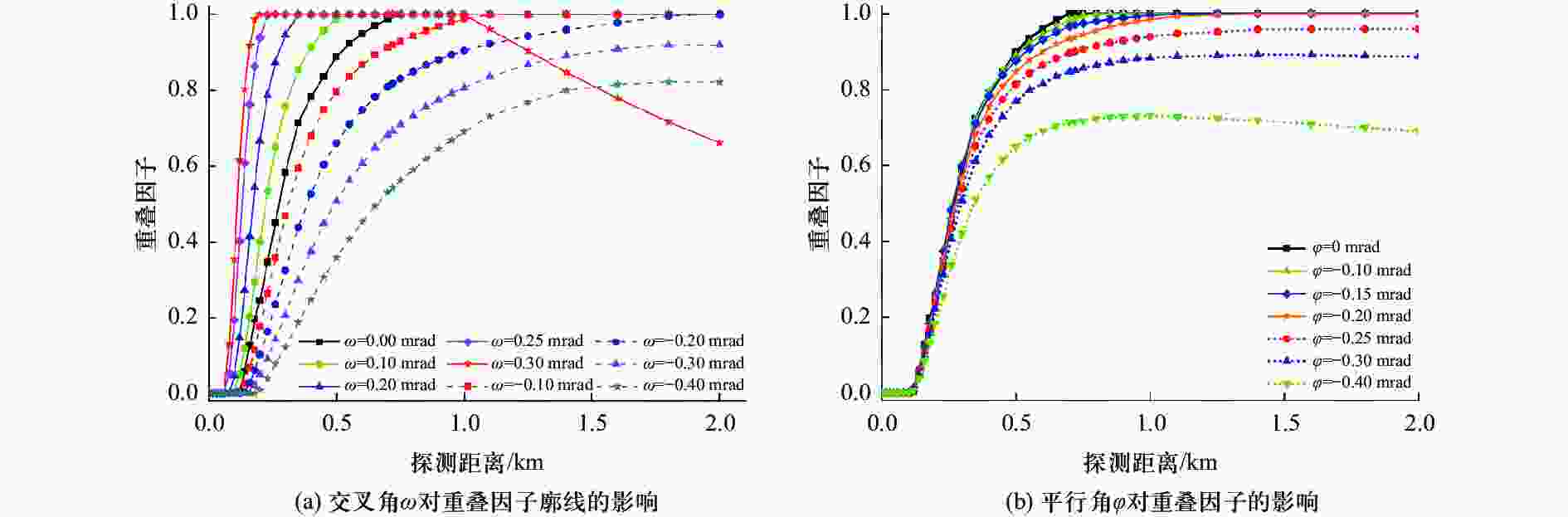
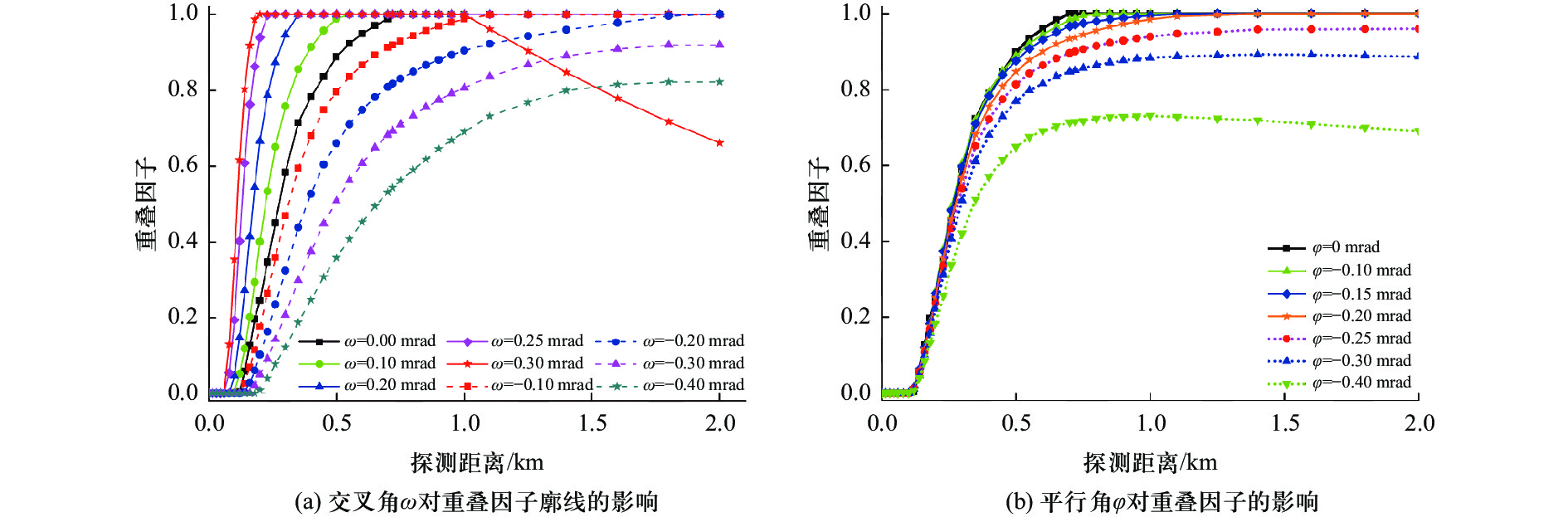
图 7交叉角
$\omega $ 和平行角φ的对重叠因子廓线的影响Figure 7.The influence of the cross angle
$\omega $ and the parallel angleφon overlap function profile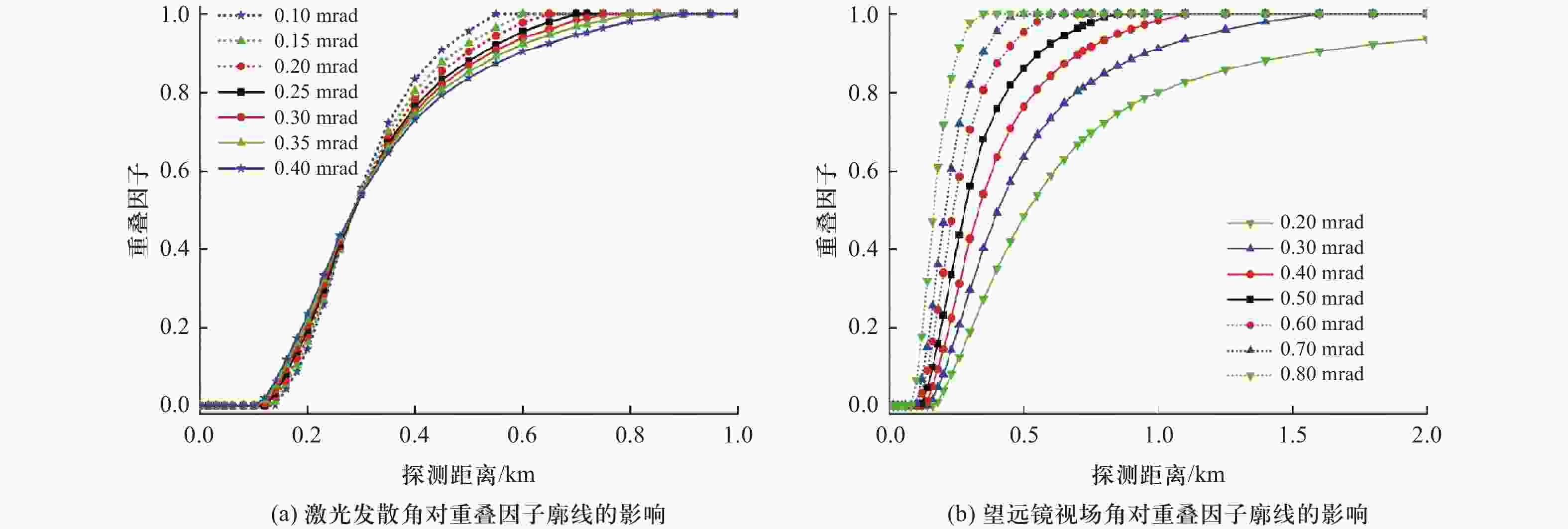
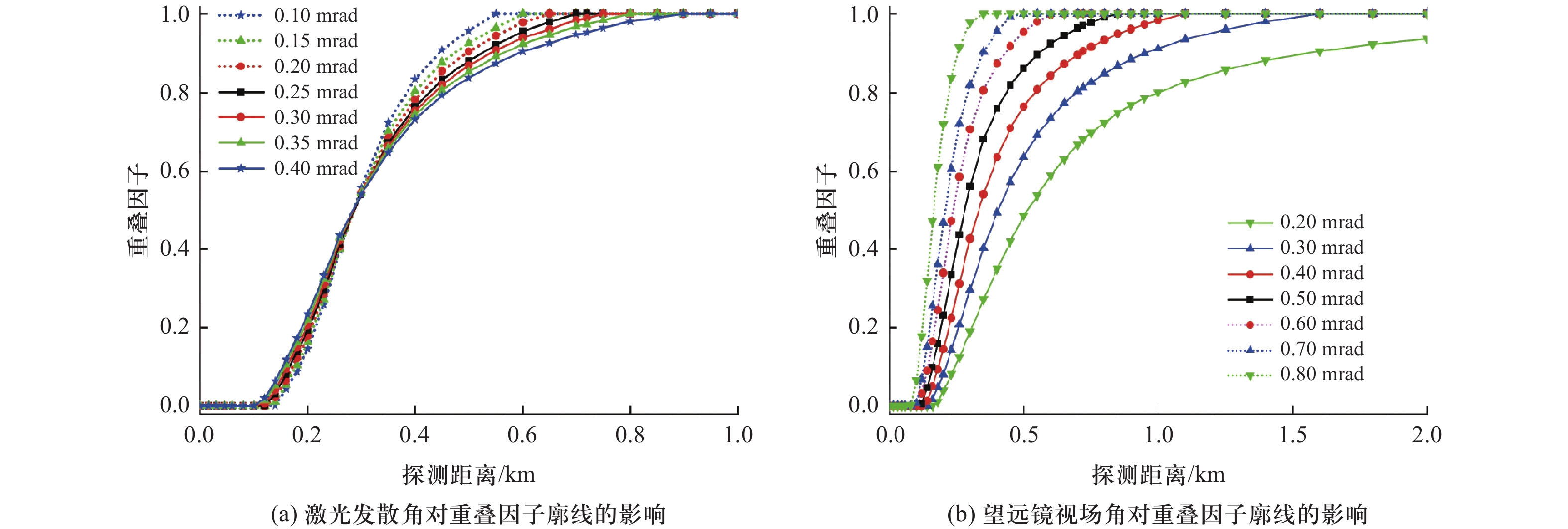
图 8激光发散角和望远镜视场角对重叠因子廓线的影响
Figure 8.The influence of the laser divergence angle and FOV of the telescope on overlap profile
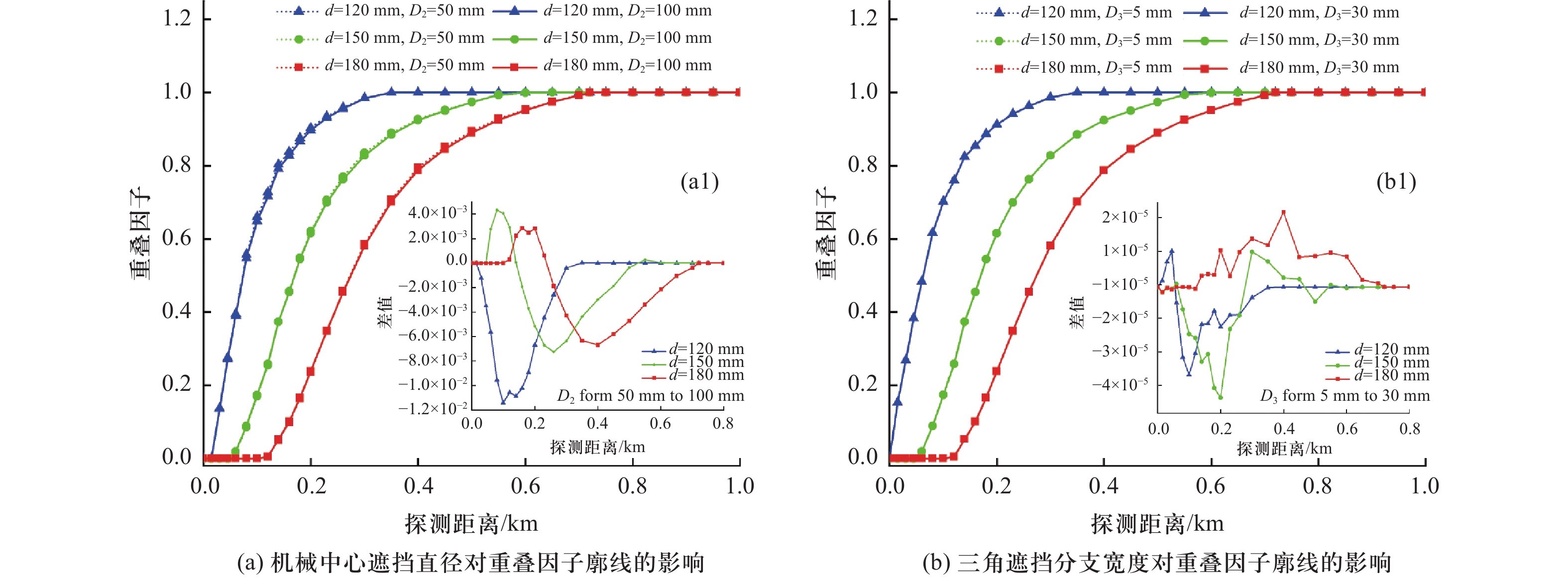
图 9中心遮挡尺寸和三角遮挡分支宽度对重叠因子廓线的影响
Figure 9.The influence of the central size and the branch width of spider obstruction on overlap profile
表 1发射和接收系统光学参数
Table 1.The optical parameters of the transmitter and receiver
发射系统 值 接收系统 值 激光类型 平顶/高斯 望远镜视场角θT/mrad 1 激光束初始直径DL/mm 40 望远镜主镜直径D1/mm 200 激光发散角θL/mrad 0.5 中心遮挡直径D2/mm 50 轴间距d0/mm 180 三角遮挡分支宽度D3/mm
焦距f/mm
视场光阑直径s/mm5
1000
1 下载:
导出CSV
下载:
导出CSV
-
[1] 李济瀚, 李晓理, 王康, 等. 基于PCA-OS-ELM的大气PM_(2.5)浓度预测[J]. bob手机在线登陆学报, 2021, 41(12): 7 − 13.LI Jihan, LI Xiaoli, WANG Kang, et al. PM2.5concentration predicition based on PCA-OS-ELM[J]. Transactions of Beijing Institute of Technology, 2021, 41(12): 7 − 13. (in Chinese) [2] 张寅超, 何敬玺, 陈思颖, 等. 拉曼-米激光雷达污染环境下气溶胶散射系数反演[J]. bob手机在线登陆学报, 2021, 41(5): 6 − 14.ZHANG Yinchao, HE Jingxi, CHEN Siying, et al. Accurate inversion of aerosol backscattering coefficient in the near-ground haze condition with rotational Raman-Mie lidar[J]. Transactions of Beijing Institute of Technology, 2021, 41(5): 6 − 14. (in Chinese) [3] HARMS J. Lidar return signals for coaxial and noncoaxial systems with central obstruction[J]. Applied Optics, 1979, 18(10): 1559 − 66.doi:10.1364/AO.18.001559 [4] SASSEN K, DODD G C. Lidar crossover function and misalignment effects[J]. Applied Optics, 1982, 21(17): 3162 − 5.doi:10.1364/AO.21.003162 [5] KUZE H, KINJO H, SAKURADA Y, et al. Field-of-view dependence of lidar signals by use of Newtonian and Cassegrainian telescopes[J]. Applied Optics, 1998, 37(15): 3128.doi:10.1364/AO.37.003128 [6] STELMASZCZYK K, DELL'AGLIO M, CHUDZYNSKI S, et al. Analytical function for lidar geometrical compression form-factor calculations[J]. Applied Optics, 2005, 44(7): 1323 − 1331.doi:10.1364/AO.44.001323 [7] 王威, 毛飞跃, 龚威, 等. 基于激光强度分布的激光雷达重叠因子计算及其敏感性分析[J]. 光学学报, 2014(2): 7 − 15.WANG Wei, MAO Feiyue, GONG Wei, et al. Overlap factor calculation method based on laser intensity distribution and its sensitivity analysis[J]. Acta Optica Sinica, 2014(2): 7 − 15. (in Chinese) [8] 狄慧鸽, 华灯鑫, 王玉峰, 等. 米散射激光雷达重叠因子及全程回波信号标定技术研究[J]. 物理学报, 2013, 62(9): 250 − 256.DI Huige, HUA Dengxin, WANG Yufeng, et al. Investigation on the correction of the Mie scattering lidar’s overlapping factor and echo signals over the total detection range[J]. Acta Physica Sinica, 2013, 62(9): 250 − 256. (in Chinese) [9] 刘巧君, 吴承璇, 郑玉臣, 等. 离轴激光雷达重叠因子解析研究[J]. 光散射学报, 2017, 29(4): 367 − 371.LIU Qiaojun, WU Chengxuan, ZHENG Yuchen, et al. The analytical formula research of the overlap factor of off-axis lidar[J]. The Journal of Light Scattering, 2017, 29(4): 367 − 371. (in Chinese) [10] 张寅超, 王琛, 陈和, 等. 基于视场权重的激光雷达几何因子计算方法[J]. 光子学报, 2020, 49(10): 53 − 60.ZHANG Yinchao, WANG Chen, CHEN He, et al. Calculation method of lidar gemetric factor based on field of view[J]. Acta Phoronica Sinica, 2020, 49(10): 53 − 60. (in Chinese) [11] SASANO Y, SHIMIZU H, TAKEUCHI N, et al. Geometrical form factor in the laser radar equation: an experimental determination[J]. Applied Optics, 1979, 18(23): 3908 − 3910.doi:10.1364/AO.18.003908 [12] TOMINE K, HIRAYAMA C, MICHIMOTO K, et al. Experimental determination of the crossover function in the laser radar equation for days with a light mist[J]. Applied Optics, 1989, 28(12): 2194 − 2195.doi:10.1364/AO.28.002194 [13] DHO S W, PARK Y J, KONG H J. Experimental determination of a geometric form factor in a lidar equation for an inhomogeneous atmosphere[J]. Applied Optics, 1997, 36(24): 6009 − 6010.doi:10.1364/AO.36.006009 [14] WANDINGER U, ANSMANN A. Experimental determination of the lidar overlap profile with Raman lidar[J]. Applied Optics, 2002, 41(3): 511 − 514.doi:10.1364/AO.41.000511 [15] GUERRERO-RASCADO J L, COSTA M J, BORTOLI D, et al. Infrared lidar overlap function: an experimental determination[J]. Optics Express, 2010, 18(19): 20350 − 20369.doi:10.1364/OE.18.020350 [16] 曹开法, 杜小勇, 汪少林, 等. 纯转动拉曼法确定激光雷达几何因子[J]. 光学学报, 2007, 27(8): 1349 − 1354.doi:10.3321/j.issn:0253-2239.2007.08.001CAO Kaifa, DU Xiaoyong, WANG Shaolin, et al. Determination of lidar geometric form factor with pure rotational Raman scattering signal[J]. Acta Optica Sinica, 2007, 27(8): 1349 − 1354. (in Chinese)doi:10.3321/j.issn:0253-2239.2007.08.001 [17] 赵培涛, 李伟, 张寅超, 等. 振动拉曼散射信号反演激光雷达几何因子分析[J]. 光学学报, 2010, 30(7): 1938 − 1944.doi:10.3788/AOS20103007.1938ZHAO Peitao, LI Wei, ZHANG Yinchao, et al. Determination of lidar geometric form factor with vibration Raman scattering signals[J]. Acta Optica Sinica, 2010, 30(7): 1938 − 1944. (in Chinese)doi:10.3788/AOS20103007.1938 [18] 纪红柱, 陈思颖, 张寅超, 等. 地基离轴拉曼-米激光雷达几何因子校正[J]. bob手机在线登陆学报, 2019, 39(6): 6 − 12.JI Hongzhu, CHEN Siying, ZHANG Yinchao, et al. Determination of geometric factor for ground-based Raman-Mie lidar with bi-static configuration[J]. Transactions of Beijing Institute of Technology, 2019, 39(6): 6 − 12. (in Chinese) [19] VELOTTA R, BARTOLI B, CAPOBIANCO R, et al. Analysis of the receiver response in lidar measurements[J]. Applied Optics, 1998, 37(30): 6999 − 7007.doi:10.1364/AO.37.006999 [20] BEREZHNYY I. A combined diffraction and geometrical optics approach for lidar overlap function computation[J]. Optics and Lasers in Engineering, 2009, 47(7−8): 855 − 859.doi:10.1016/j.optlaseng.2009.01.011 [21] KUMAR D, ROCADENBOSCH F. Determination of the overlap factor and its enhancement for medium-size tropospheric lidar systems: a ray-tracing approach[J]. Journal of Applied Remote Sensing, 2013, 7(1): 2 − 8. [22] CHEN R, JIANG Y, WEN L, et al. Calculation of the overlap factor for scanning LiDAR based on the tridimensional ray-tracing method[J]. Applied Optics, 2017, 56(16): 4636 − 4645.doi:10.1364/AO.56.004636 -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数:123
- HTML全文浏览量:64
- PDF下载量:14
- 被引次数:0