

Trajectory Tracking Control Strategy for Oblique Driving of 4WIS Unmanned Vehicle
-
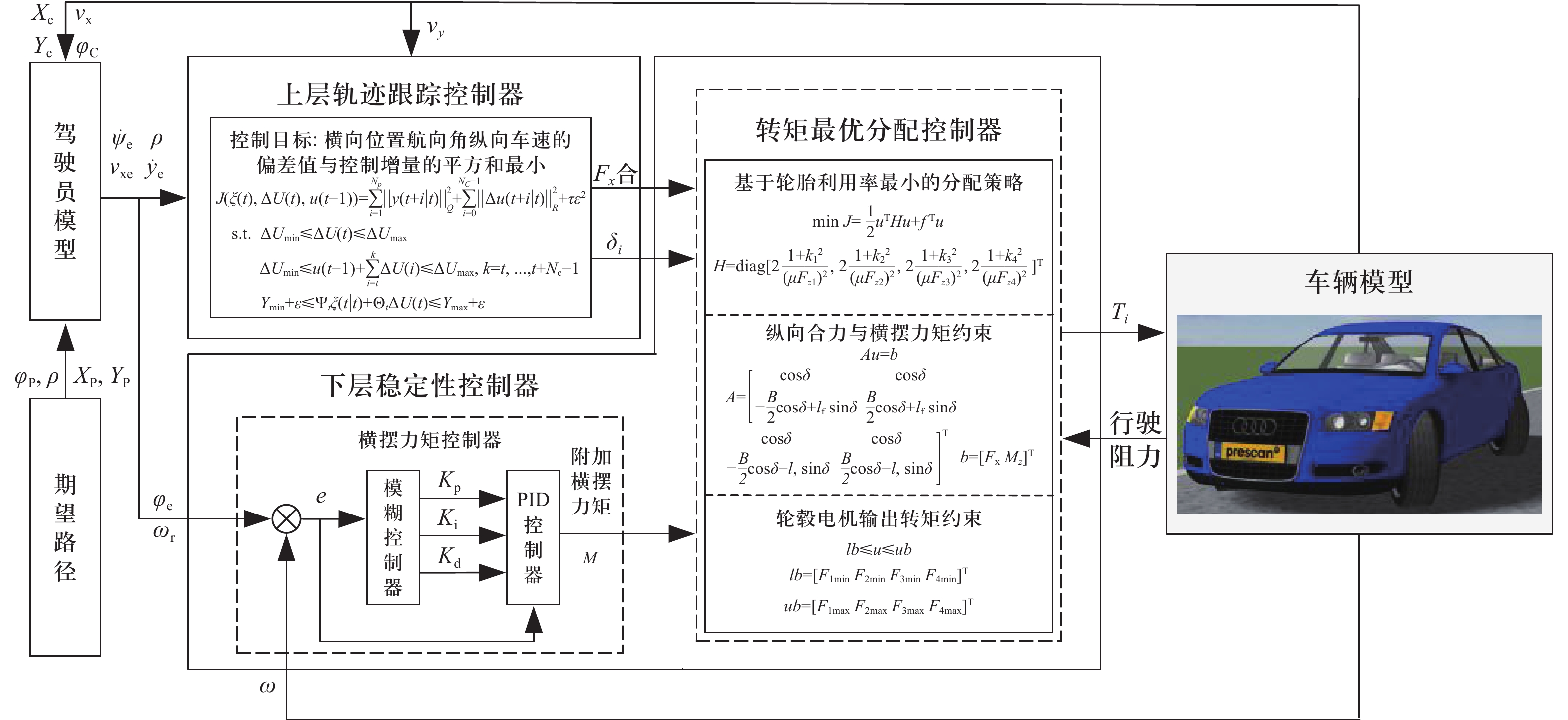
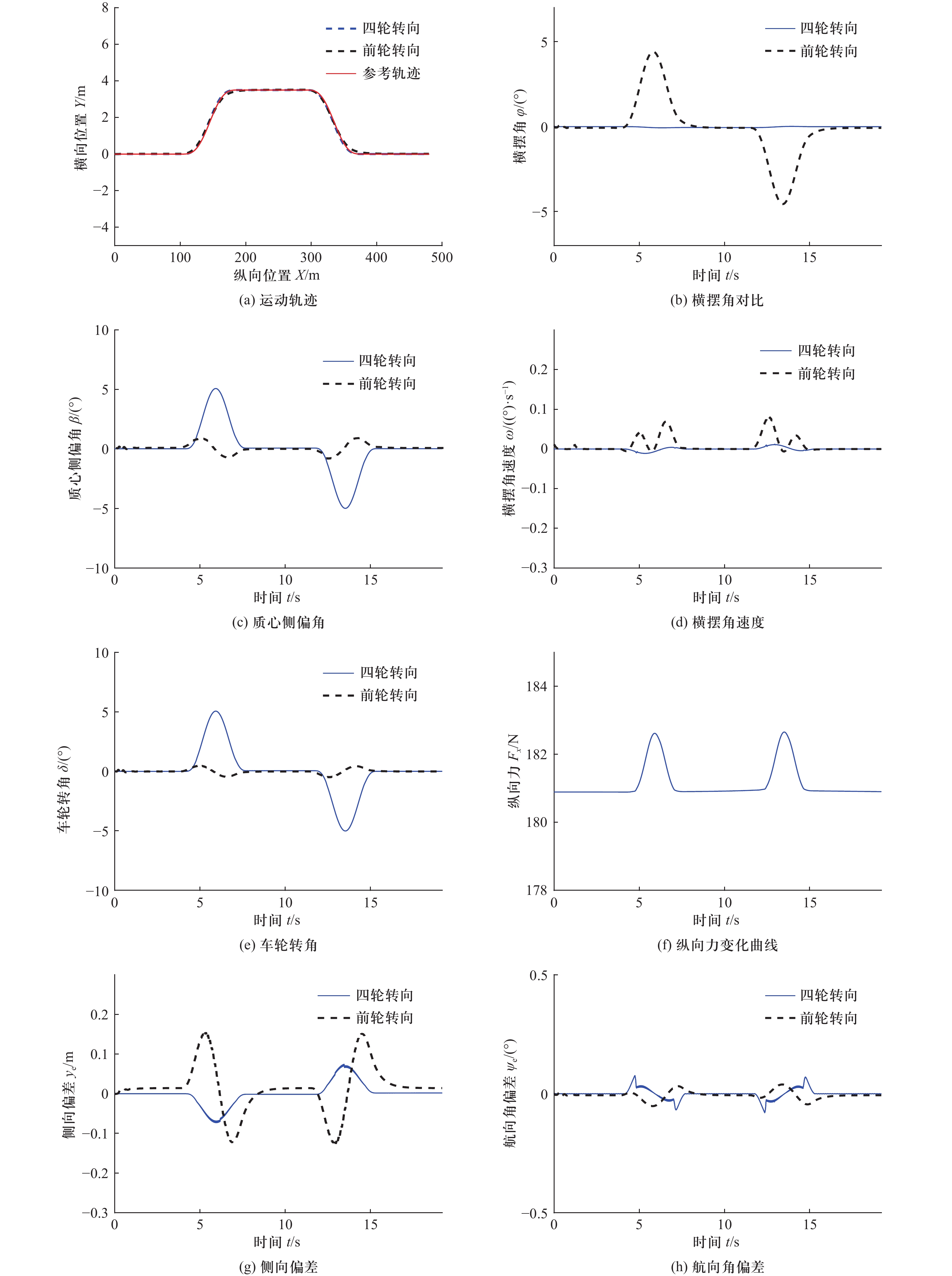
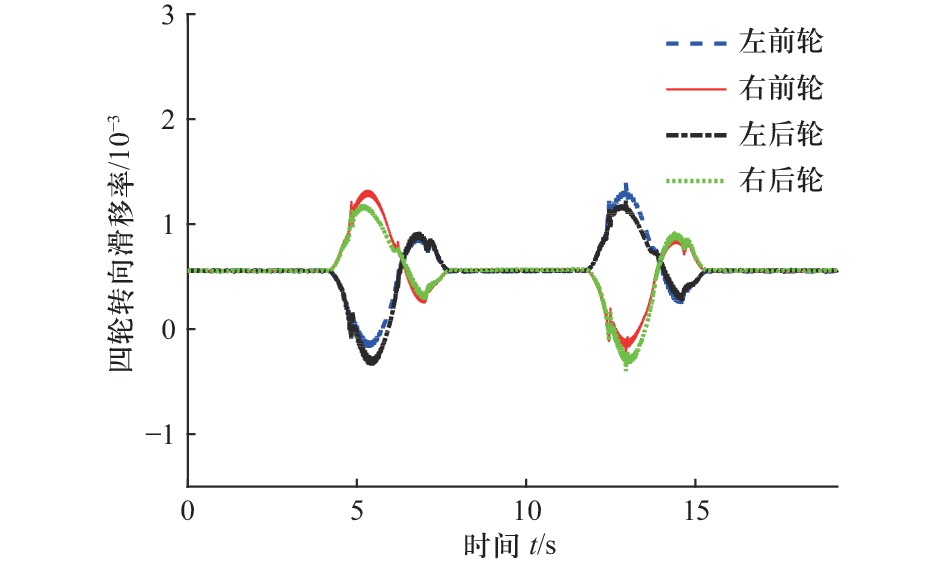
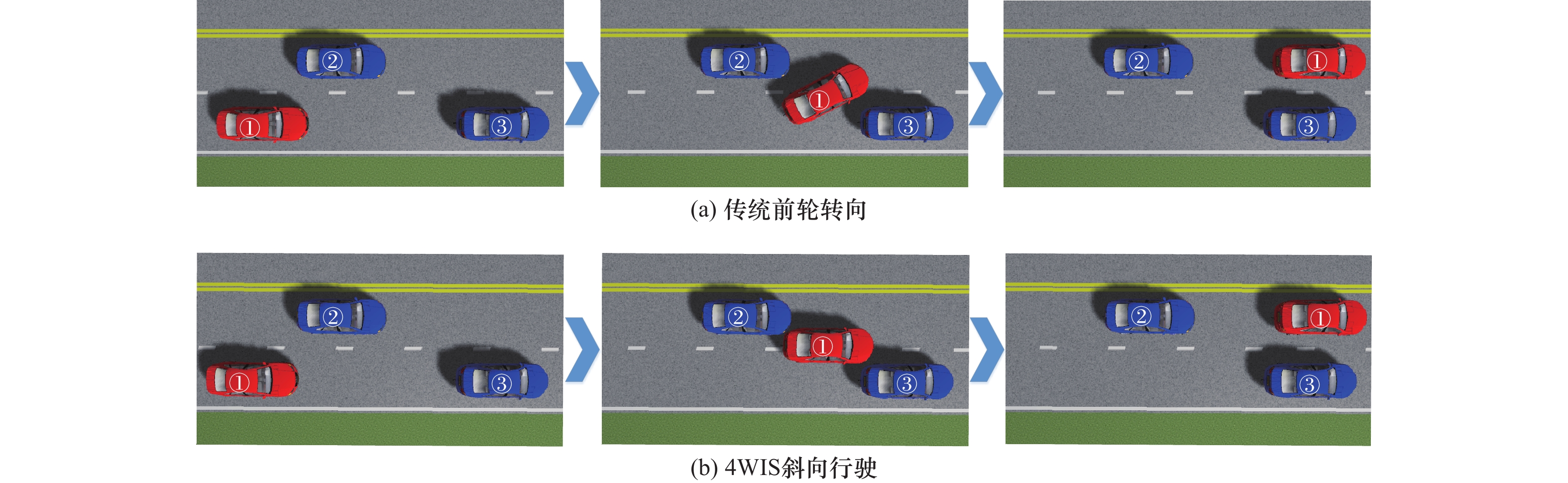
摘要:针对四轮独立转向电动汽车转向系统成本高、但功能开发程度低的问题,提出一种车辆斜向行驶控制策略,优化四轮独立转向电动汽车换道过程中的行驶稳定性. 基于四轮独立转向电动汽车横向、纵向二自由度车辆模型,提出一种横纵向耦合轨迹跟踪控制方法,该方法基于线性时变模型采用模型预测控制(MPC)算法,对横向偏差、航向角偏差及纵向速度偏差进行闭环控制. 设计车辆稳定性控制器,包括横摆力矩控制器和转矩分配控制器,同时提高车辆轨迹跟踪精度和行驶稳定性. 最后搭建Simulink/Carsim/Prescan联合仿真平台,对四轮独立转向电动汽车双移线工况进行模拟换道仿真,仿真结果证明了斜向变道的可行性和横纵向耦合轨迹跟踪控制方法的有效性.
-
关键词:
- 四轮独立转向电动汽车/
- 轨迹跟踪/
- 斜向行驶/
- 横纵向耦合/
- 线性时变
Abstract:Aiming at the problem of high cost of steering system of four-wheel independent steering electric vehicle (4WIS-EV) and less functional development, a vehicle oblique driving control method was proposed to optimize the driving stability of 4WIS-EV during lane changing. Firstly, based on the 4WIS-EV lateral and longitudinal two-degree-of-freedom vehicle model, a lateral and longitudinal coupled trajectory tracking control method was proposed. According to linear-time-variant (LTV) model and model predictive control (MPC) algorithm, a closed-loop control of lateral deviation, heading angle deviation and longitudinal speed deviation was carried out. And then, a vehicle stability controller was designed, including yaw moment controller and torque distribution controller to improve trajectory tracking accuracy and driving stability simultaneously. Finally, a Simulink/Carsim/Prescan co-simulation platform was built to carry out the lane-changing simulation of the 4WIS-EV in double-line shifting condition. The simulation results show the feasibility of the oblique lane change and the effectiveness of the lateral and longitudinal coupled trajectory tracking control method. -
[1] NAH J, YIM S. Vehicle stability control with four-wheel independent braking, drive and steering on in-wheel motor-driven electric vehicles[J]. Electronics. 2020, 9(11): 1934 − 1950. [2] LEI Y L, WEN G Z, FU Y, et al. Trajectory-following of a 4WID-4WIS vehicle via feedforward-backstepping sliding-mode control[J]. Proceedings of the Institution of Mechanical Engineers Part D-Journal of Automobile Engineering. 2022, 236(2 − 3): 322 − 333. [3] 胡红元, 李兵, 王阳阳. 汽车4轮转向技术研究综述[J]. 上海汽车. 2021, 2021(4): 19 − 23.HU Hongyuan, LI Bing, WANG Yangyang. A review of research on four-wheel steering technology of automobiles[J]. Shanghai Automotive. 2021, 2021(4): 19 − 23. (in Chinese) [4] HANG P, CHEN X B. Towards autonomous driving: review and perspectives on configuration and control of four-wheel independent drive/steering electric vehicles[J]. Actuators. 2021, 10(8): 184 − 204. [5] 陈特, 徐兴, 蔡英凤, 等. 基于状态估计的无人车前轮转角与横摆稳定协调控制[J]. bob手机在线登陆学报. 2021, 41(10): 1050 − 1057.CHEN Te, XU Xing, CAI Yingfeng, et al. Coordinated control of front-wheel steering angle and yaw stability for unmanned ground vehicle based on state estimation[J]. Transactions of Beijing Institute of Technology. 2021, 41(10): 1050 − 1057. (in Chinese) [6] LEI Y L, WEN G Z, FU Y, et al. Trajectory-following of a 4WID-4WIS vehicle via feedforward-backstepping sliding-mode control[J]. Journal of Automobile Engineering. 2022, 236(2 − 3): 322 − 333. [7] 夏秋, 陈龙, 徐兴, 等. 基于故障估计的无人车容错控制方法[J]. bob手机在线登陆学报. 2022, 42(7): 723 − 732.XIA Qiu, CHEN Long, XU Xing, et al. Fault estimation based fault-tolerant control method for unmanned vehicle[J]. Transactions of Beijing Institute of Technology. 2022, 42(7): 723 − 732. (in Chinese) [8] 胡宇辉, 王旭, 胡家铭, 等. 越野环境下无人驾驶车辆技术研究综述[J]. bob手机在线登陆学报. 2021, 41(11): 1137 − 1144.HU Yuhui, WANG Xu, HU Jiaming, et al. An overview of unmanned vehicle technology research in off-road environment[J]. Transactions of Beijing Institute of Technology. 2021, 41(11): 1137 − 1144. (in Chinese) [9] LIU X, WANG W, LI X, et al. MPC-based high-speed trajectory tracking for 4WIS robot. [J]. ISA transactions. 2022, 123(1): 413 − 424. [10] 许芳, 张君明, 胡云峰, 等. 智能车辆路径跟踪横纵向耦合实时预测控制器[J]. 吉林大学学报(工学版). 2021, 51(6): 2287 − 2294.XU Fang, ZHANG Junming, HU Yunfeng, et al. Lateral and longitudinal coupling real-time predictive controller for intelligent vehicle path tracking[J]. Journal of Jilin University(Engineering Ed. ). 2021, 51(6): 2287 − 2294. (in Chinese) [11] 罗文发, 吴光强, 郑松林. 基于HSRI模型的参数自适应质心侧偏角观测器的设计[J]. 汽车工程. 2013, 35(3): 249 − 255.LUO Wenfa, WU Guangqiang, ZHENG Songlin. Design of vehicle sideslip angle observer with parameter adaptation based on HSRI tire model[J]. Automotive Engineering. 2013, 35(3): 249 − 255. (in Chinese) -

 下载:
下载:


 点击查看大图
点击查看大图

图(6)
计量
- 文章访问数:193
- HTML全文浏览量:65
- PDF下载量:42
- 被引次数:0