

Search Strategy Based on Sensors with Different Detection Distances
-
摘要:提出了一种针对侦察任务隐蔽点的搜索策略,主要应用于装备了不同探测距离传感器的地面无人机动平台,解决了已有随机搜索策略效率不高的问题. 该策略使用基于传感器的导向快速随机搜索树方法进行目标方向的路径规划;在路径规划的过程中若遇到障碍物形成的狭窄通道时,基于启发式A*方法规划路径以提高效率,最终完成搜索策略. 将搜索策略命名为:组合传感器与规划组合搜索策略. 设计仿真试验对所提出的搜索策略进行了验证. 结果表明在直径500米有遮挡的仿真场景下,所提出的搜索策略相比于短探测距离传感器的路径变形策略快速随机搜索树策略效率平均提升了3.11倍,规划的道路长度缩短了9.63%,所提出的搜索策略相比于长探测距离传感器导向搜索策略效率平均提升了3.53倍,规划的道路长度缩短了12.06%,证明了CP&CS搜索策略在侦察任务中隐蔽点搜索上的优越性.Abstract:In order to improve the efficiency of existing random search methods, a search strategy was proposed to reconnoiter a hidden-object of the reconnaissance mission. The strategy, called combined planning path and combined sensor search method (CP&CS), was designed mainly to be applied to unmanned ground vehicles equipped with different detection range sensors. In CP&CS, a sensor-based goaled rapidly-exploring random tree was arranged to plan the global path towards the hidden object. Besides, a heuristic A* method was utilized to deal with the narrow channel formed by obstacles. A simulation experiment was designed to validate the proposed strategy. The results show that in a simulation environment with 250 meter radius and occlusions, compared with the path deformation strategy with short-range sensors, the CP&CS method can improve the search efficiency by 3.11 times and shortens the length of planned path by 9.63%. Compared with goaled RRT search strategy with long-range sensors, the CP&CS method can improve the search efficiency by 3.53 times and shortens the length of planned path by 12.06%. The experimental results prove the superiority of the proposed CP&CS strategy in hidden-object search of reconnaissance mission.
-
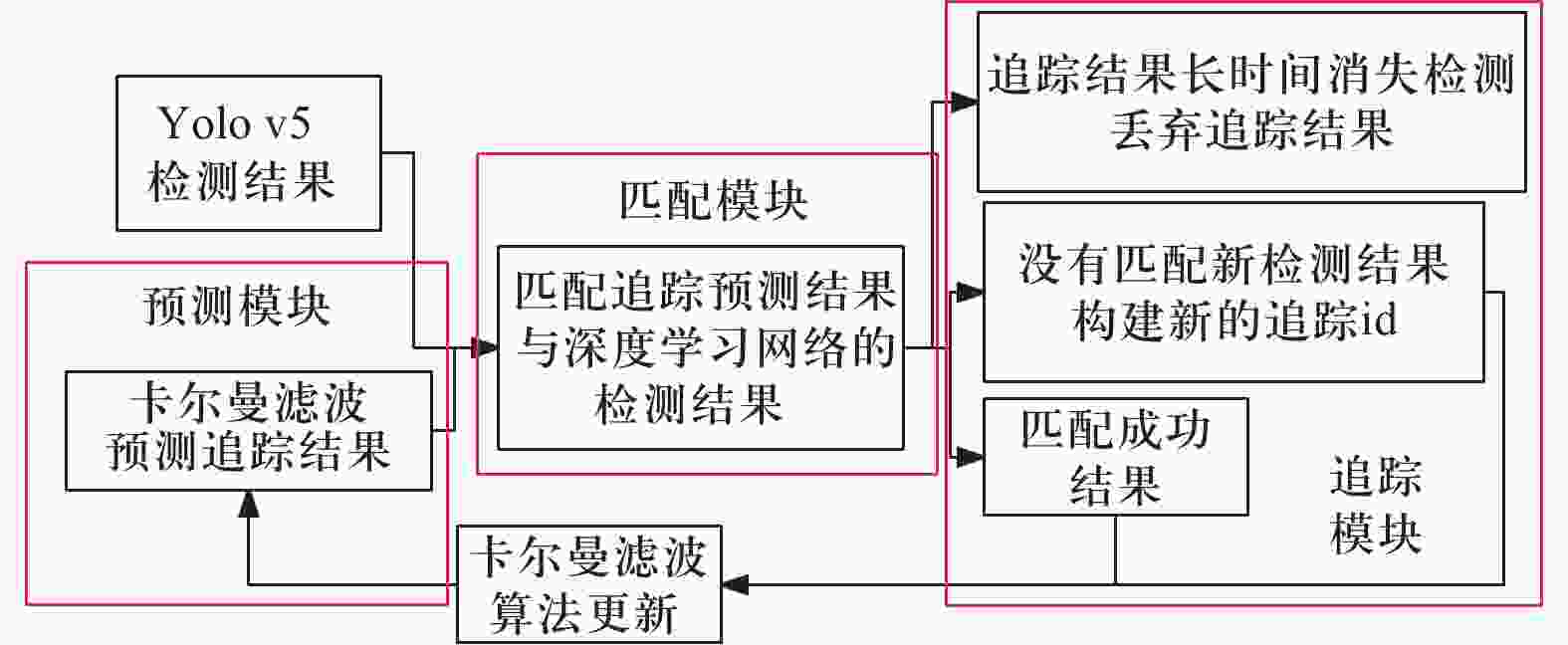
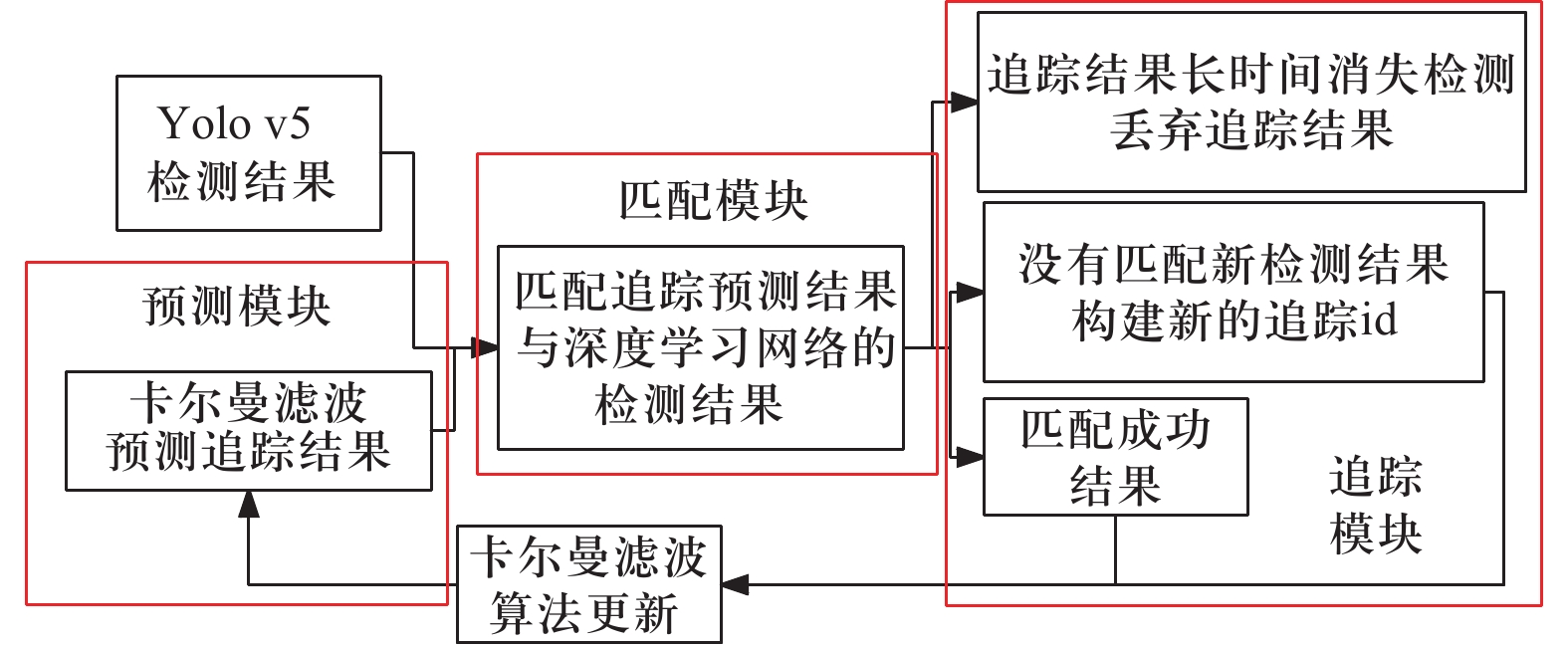
图 2Yolo v5网络输入结果进行DeepSort目标追踪
Figure 2.Using DeepSort for object detection based on Yolov5 result
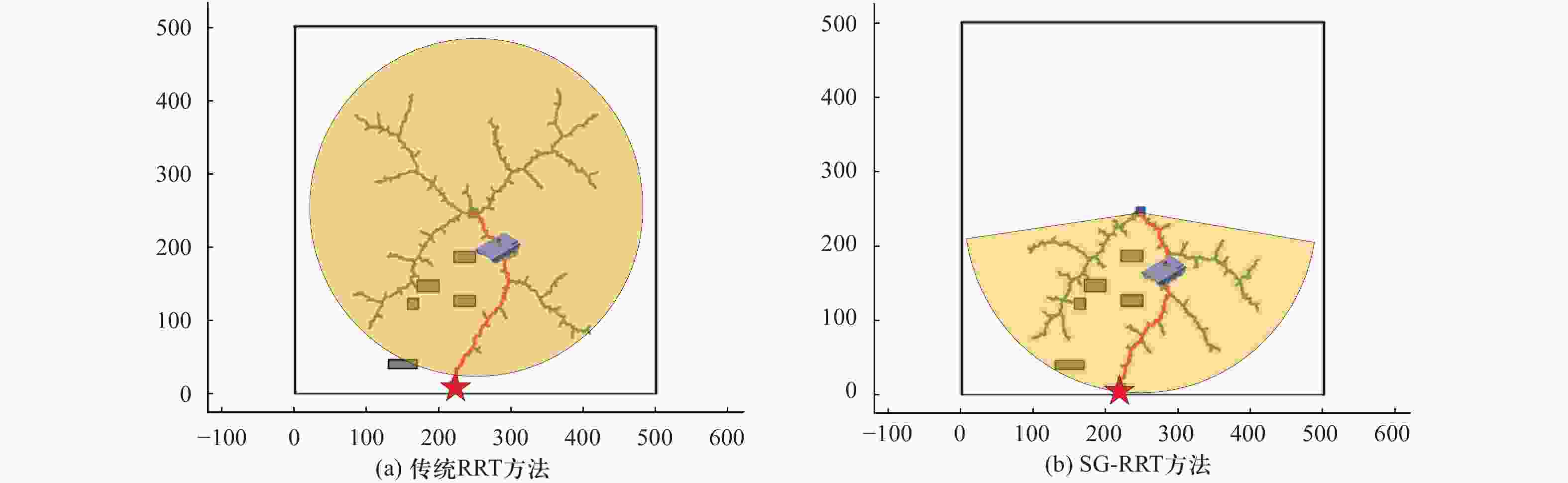
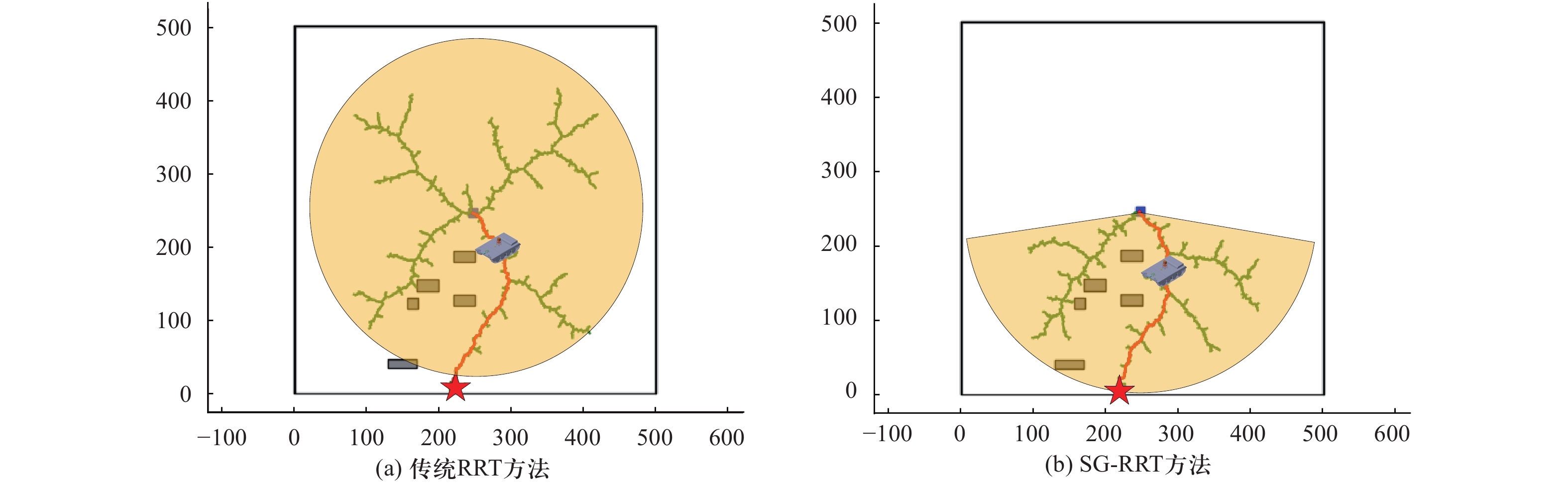
图 4500 m×500 m仿真环境中圆形和扇形部分是搜索范围
Figure 4.Roundness and sector search field in 500 m×500 m simulation environment
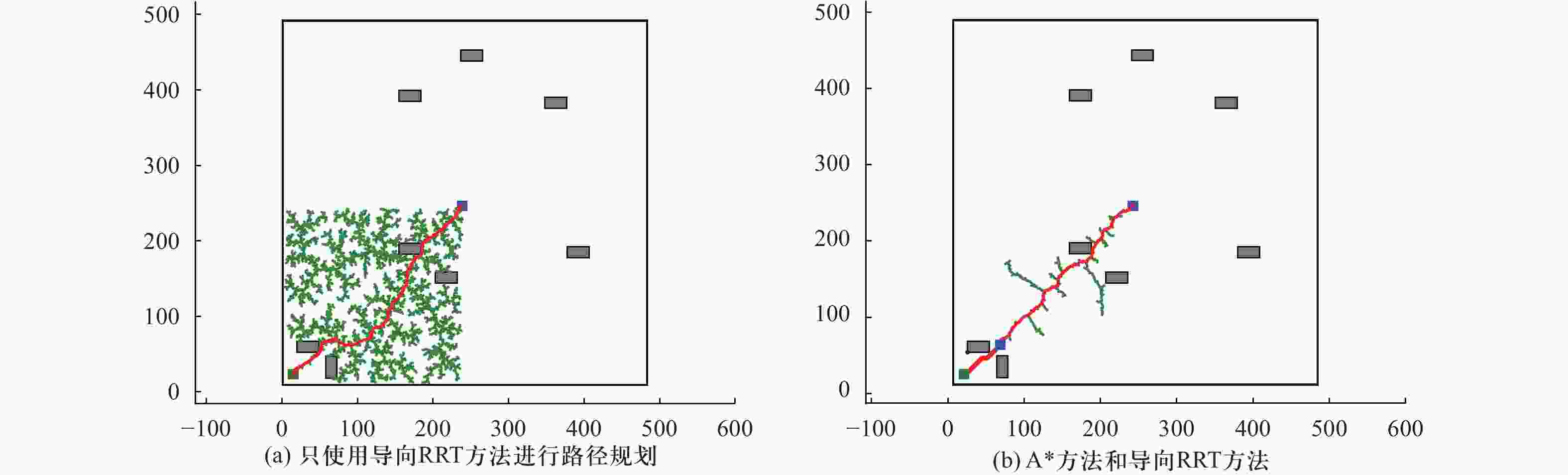
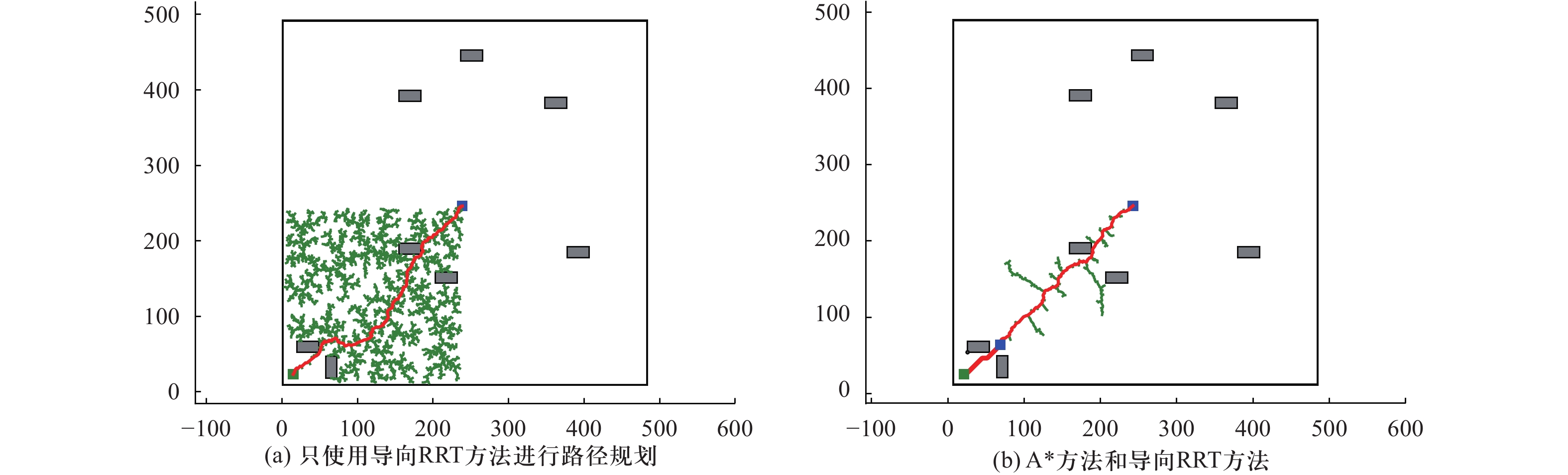
图 5500m×500m仿真环境中遇到障碍物之间狭窄通道情况进行路径规划
Figure 5.Path planning for narrow passage cases encountered between obstacles algorithm for path planning in 500m×500m simulation environment
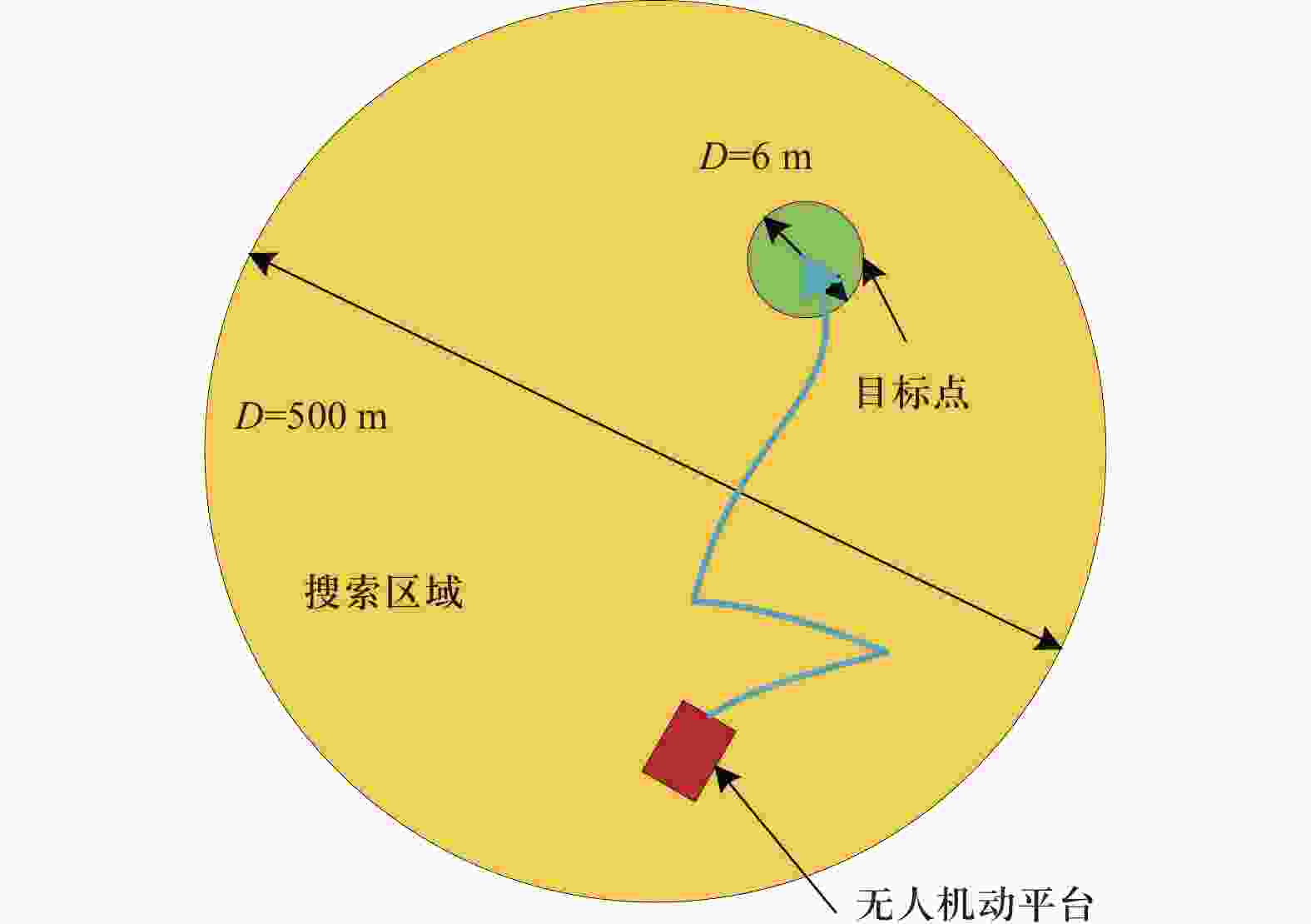
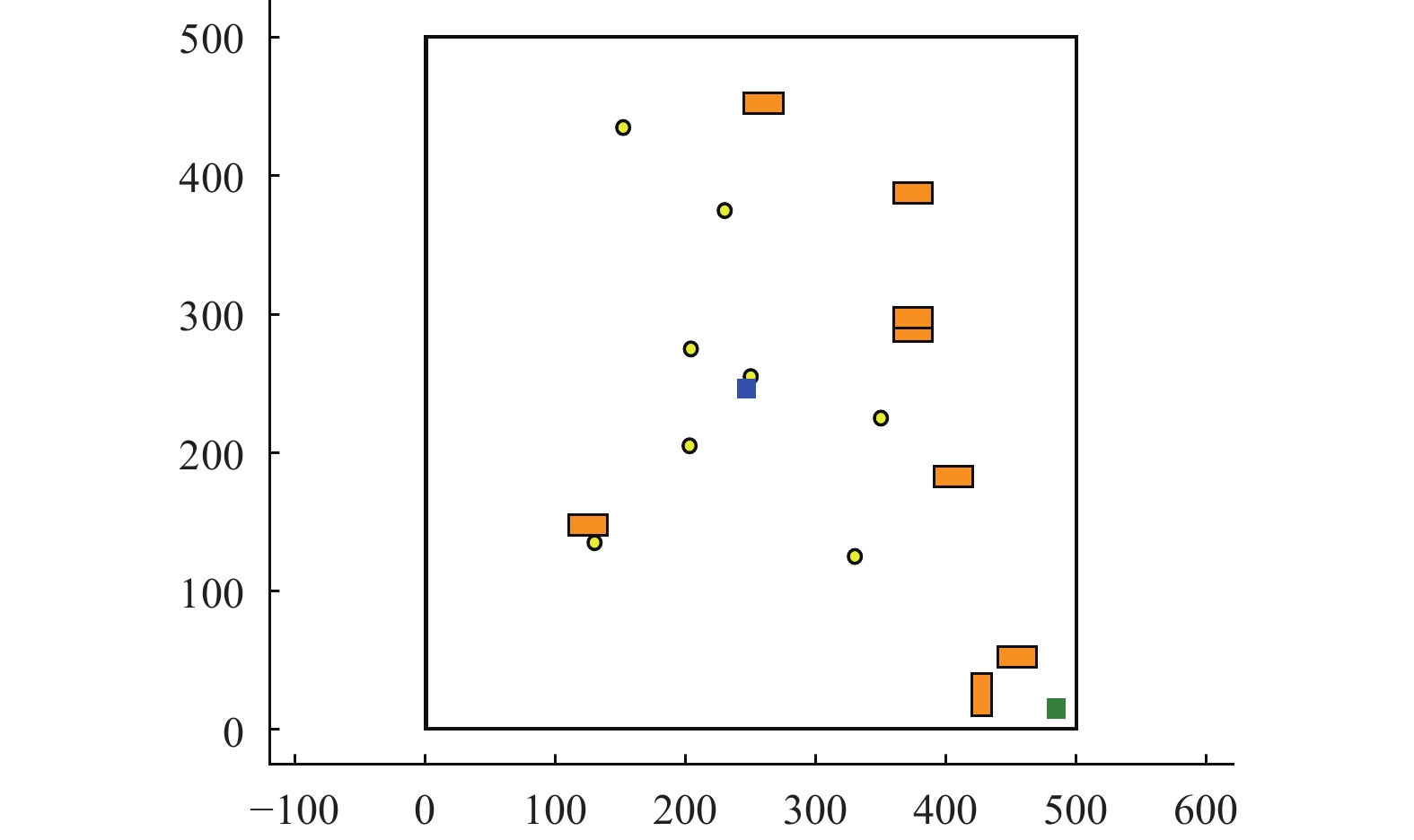
图 8进入搜索区域进行目标搜索并停靠目标点
Figure 8.Search area for target search and dock the target point
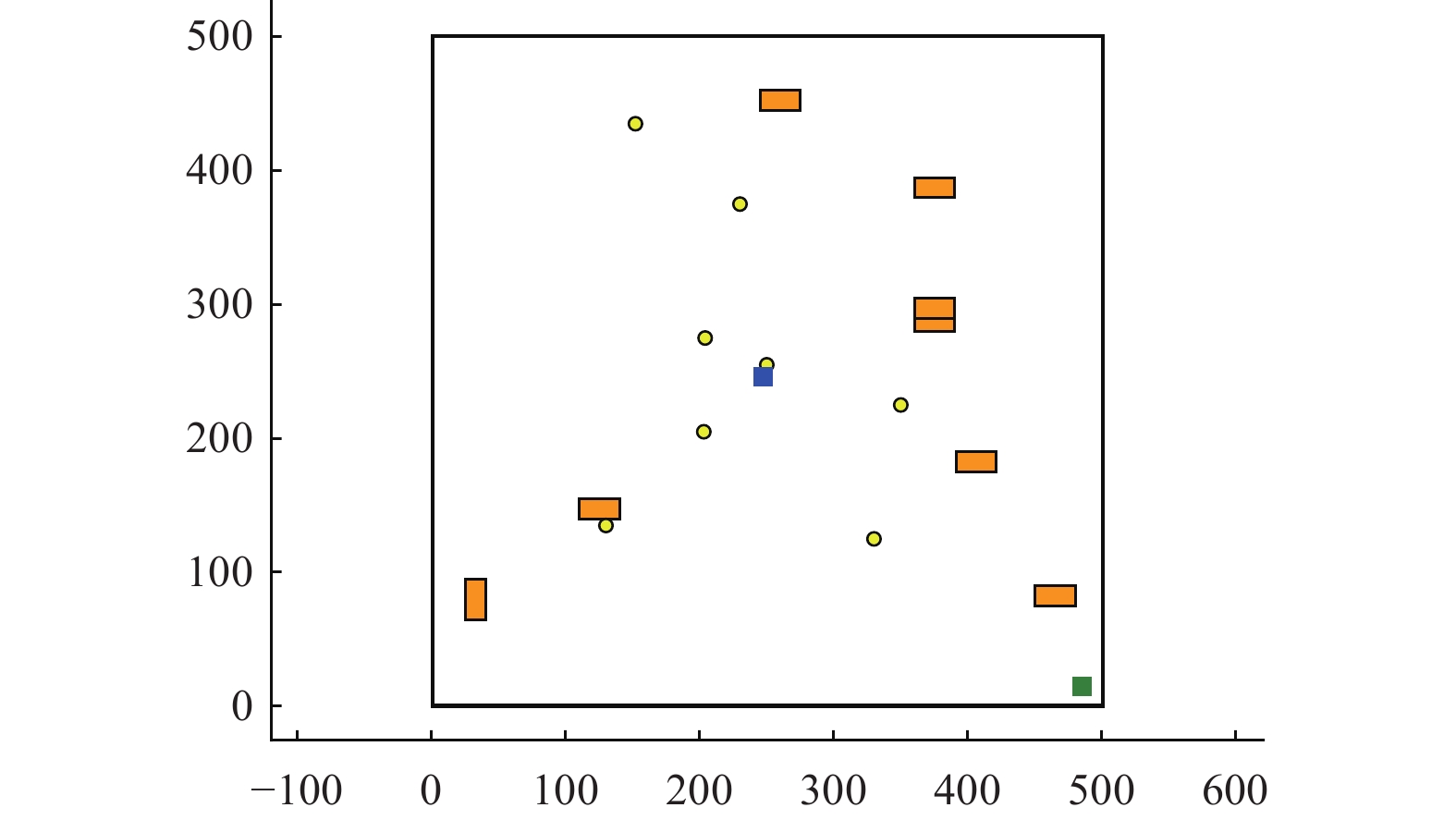
图 9仿真环境随机生成无障碍通道地图
Figure 9.Map generated randomly without barricade in simulation environment
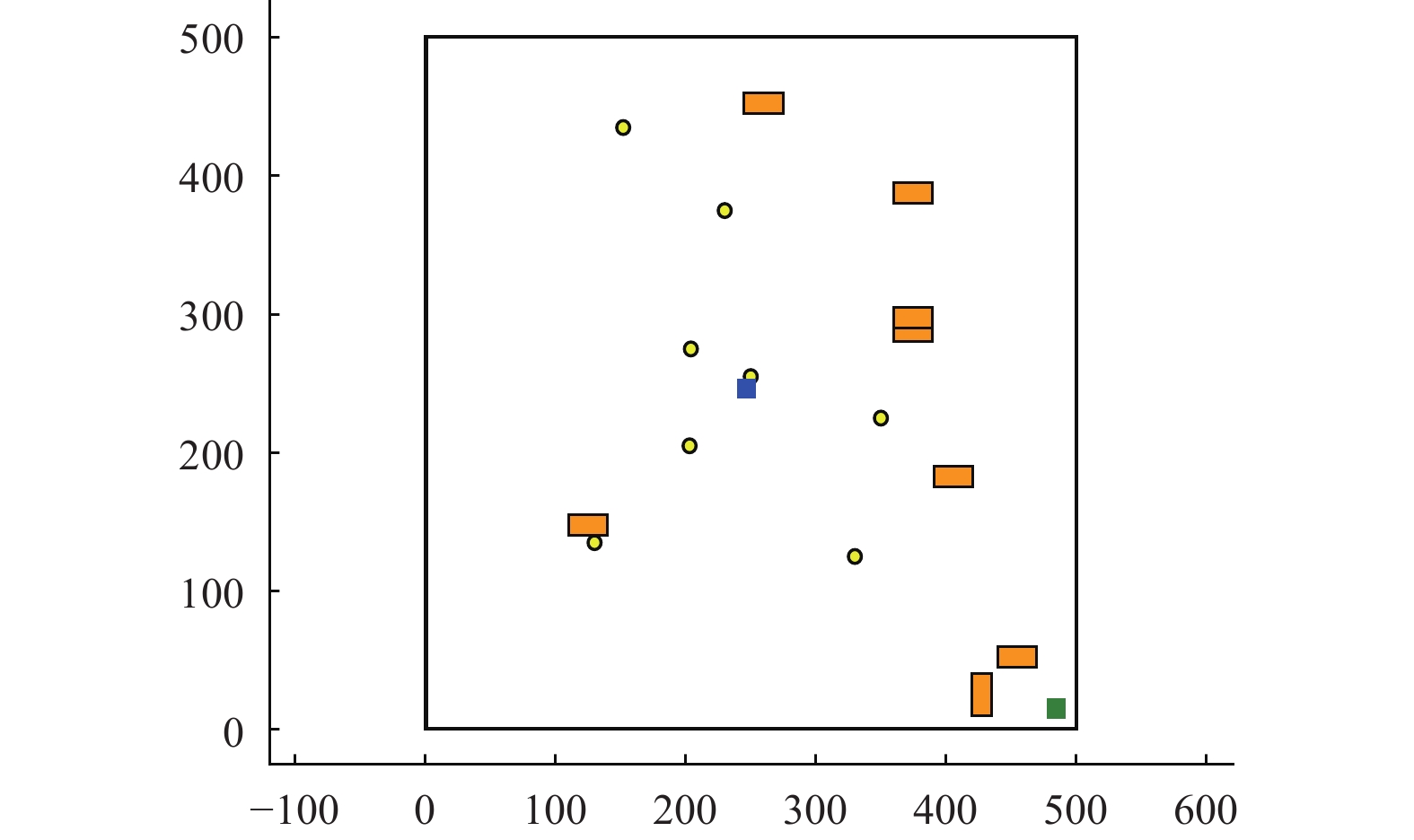
图 10仿真环境生成有障碍物通道的地图
Figure 10.Map generated randomly with barricade in simulation environment

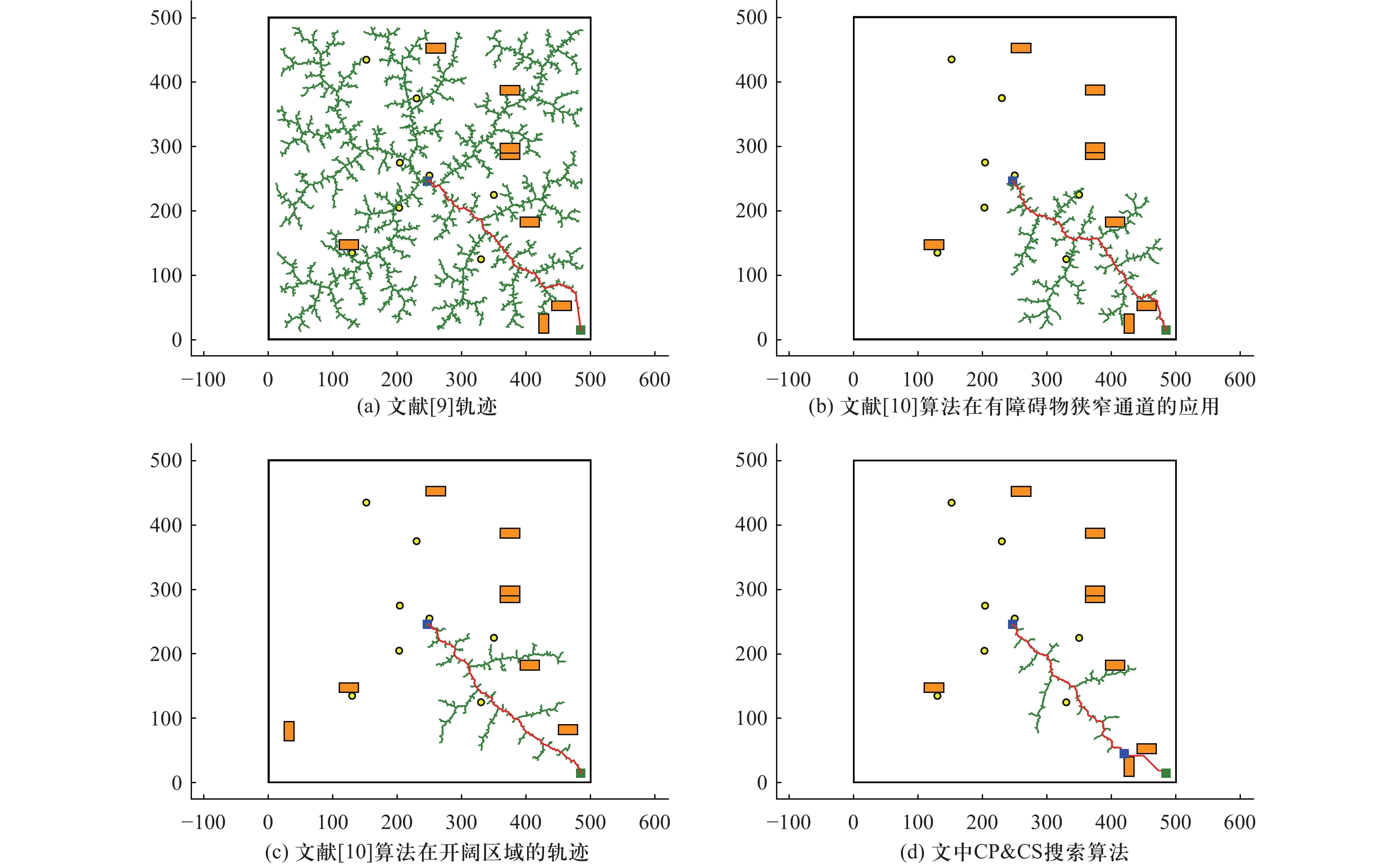
图 11基于随机生成地图在仿真环境下在有障碍物狭窄通道组合轨迹
Figure 11.Narrow passage combined trajectory based on randomly generated maps in the simulation environment with barricade
表 1光电平台参数
Table 1.Parameter of photoelectric platform
参数 数值 总质量M1/kg 200 激光测距精度/m ±0.02 (100~1000)
±0.05 (>1000)光电平台焦距f/mm 220 俯仰视场角τ/(°) 30(−45°~+45°范围内运动)  下载:
导出CSV
下载:
导出CSV
表 2无人机动平台参数
Table 2.Parameter of unmanned platform
参数 数值 长L×宽W×高H/(m×m×m) $ \text{5.476×2.978×1.45} $ 总质量M/kg 9360 下载:
导出CSV
表 3相机参数
Table 3.Parameter of camera
参数 数值 视场角/(°) 120 测量范围/m 0.3~25 测量精度/m ±0.03 (0.3 m ~25 m) 下载:
导出CSV
表 4宽阔区域仿真试验统计
Table 4.Time of search task in simulation
下载:
导出CSV
表 5通道区域仿真试验统计
Table 5.Time of search task in simulation
下载:
导出CSV
表 6使用A*算法和DijKstra算法试验统计
Table 6.Time of search task in simulation
规划效果 A*算法 DijKstra算法 平均路径/m 30 31 轨迹点个数 15.2 17 平均时间/s 5 20 下载:
导出CSV
-
[1] 戴晶辰, 王禹宁, 马文欣, 等. 自动驾驶时代道路设计初探[J]. 城市发展研究, 2021, 28(12): 68 − 76.doi:10.3969/j.issn.1006-3862.2021.12.017DAI Jingchen, WANG Yuning, MA Wenxin, et al. A preliminary study of road design in the era of autonomous driving[J]. Search on development of urban, 2021, 28(12): 68 − 76. (in Chinese)doi:10.3969/j.issn.1006-3862.2021.12.017 [2] 赵晋燕, 罗素云, 陈杨钟. 非结构化道路分割算法研究[J]. 智能计算机与应用, 2021, 11(11): 148 − 152+156.doi:10.3969/j.issn.2095-2163.2021.11.032ZHAO Jinyan, LUO Suyun, CHEN Yangzhong. Research on unstructured road segmentation algorithms[J]. Smart Computers & Applications, 2021, 11(11): 148 − 152+156. (in Chinese)doi:10.3969/j.issn.2095-2163.2021.11.032 [3] TANG G, TANG C, ZHOU H, et al. R-DFS: A coverage path planning approach based on region optimal decomposition[J]. Remote Sensing, 2021, 13(8): 1525.doi:10.3390/rs13081525 [4] AGGARWAL S, KUMAR N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges[J]. Computer Communications, 2020, 149: 270 − 299.doi:10.1016/j.comcom.2019.10.014 [5] PATLE B K, PANDEY A, PARHI D R K, et al. A review: On path planning strategies for navigation of mobile robot[J]. Defence Technology, 2019, 15(4): 582 − 606.doi:10.1016/j.dt.2019.04.011 [6] AMIGONI F, CAGLIOTI V. An information-based exploration strategy for environment mapping with mobile robots[J]. Robotics and Autonomous Systems, 2010, 58(5): 684 − 699.doi:10.1016/j.robot.2009.11.005 [7] SCHMID L, PANTIC M, KHANNA R, et al. An efficient sampling-based method for online informative path planning in unknown environments[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 1500 − 1507.doi:10.1109/LRA.2020.2969191 [8] WANG J, MENG M Q H, KHATIB O. EB-RRT: optimal motion planning for mobile robots[J]. IEEE Transactions on Automation Science and Engineering, 2020, 17(4): 2063 − 2073.doi:10.1109/TASE.2020.2987397 [9] HU B, CAO Z, ZHOU M C. An efficient RRT-based framework for planning short and smooth wheeled robot motion under kinodynamic constraints[J]. IEEE Transactions on Industrial Electronics, 2020, 68(4): 3292 − 3302. [10] 韩丰键, 邱书波, 冯超, 等. 基于目标导向的双向RRT路径规划算法[J]. 齐鲁工业大学学报, 2021, 35(1): 35 − 43.doi:10.16442/j.cnki.qlgydxxb.2021.01.007HAN Fengjian, QIU Shubo, FENG Chao, et al. Goal-oriented BI-RRT path planning algorithm[J]. Journal of Qilu University of Technology, 2021, 35(1): 35 − 43. (in Chinese)doi:10.16442/j.cnki.qlgydxxb.2021.01.007 [11] Delmerico J, Mueggler E, Nitsch J, et al. Active autonomous aerial exploration for ground robot path planning[J]. IEEE Robotics and Automation Letters, 2017, 2(2): 664 − 671.doi:10.1109/LRA.2017.2651163 [12] GAMMELL J D, SRINIVASA S S, BARFOOT T D. Informed RRT*: optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic[C]//Proceedings of 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. [S. l. ]: IEEE, 2014: 2997-3004. [13] 王建中, 张驰逸, 孙庸. 三联神经网络与区域自适应策略融合的目标跟踪方法[J]. bob手机在线登陆学报, 2021, 41(2): 169 − 176.doi:10.15918/j.tbit1001-0645.2020.010WANG Jianzhong, ZHANG Chiyi, SUN Yong. Target tracking method based on fusion of triple neural network and area adaptation[J]. Transactions of Beijing Institute of Technology, 2021, 41(2): 169 − 176. (in Chinese)doi:10.15918/j.tbit1001-0645.2020.010 [14] WU T H, WANG T W, LIU Y Q. Real-time vehicle and distance detection based on improved yolo v5 network[C]//2021 3rd World Symposium on Artificial Intelligence (WSAI). Changzhou: IEEE, 2021: 24 − 28. [15] 丁泽亮, 胡宇辉, 龚建伟, 等. 基于深度学习的自适应场景路面提取方法[J]. bob手机在线登陆学报, 2019, 39(11): 1133 − 1137.doi:10.15918/j.tbit1001-0645.2018.312DING Zeliang, HU Yuhui, GONG Jianwei, et al. Adaptive road extraction method in different scene based on deep learning[J]. Transactions of Beijing Institute of Technology, 2019, 39(11): 1133 − 1137. (in Chinese)doi:10.15918/j.tbit1001-0645.2018.312 [16] ALATISE M B, HANCKE G P. A review on challenges of autonomous mobile robot and sensor fusion methods[J]. IEEE Access, 2020, 8: 39830 − 39846.doi:10.1109/ACCESS.2020.2975643 [17] GAN Y, ZHANG B, KE C, et al. Research on robot motion planning based on RRT algorithm with nonholonomic constraints[J]. Neural Processing Letters, 2021, 53(4): 3011 − 3029.doi:10.1007/s11063-021-10536-4 -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数:148
- HTML全文浏览量:57
- PDF下载量:30
- 被引次数:0